Build the Simple Tachometer Sensor for DC Motor Speed Control
สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์ของบอร์ดทดลองเพิ่มเติม ทั้งนีัเพื่อต้องการให้เราสามารถควบคุมควบเร็วให้กับมอเตอร์ด้วยระบบปิด (Closed-Loop Control) หรือเรียกระบบควบคุมแบบป้อนกลับ (Feedback Control) โดยตัววงจรและอุปกรณ์ที่จะนำมาสร้างการตรวจจับความเร็วรอบนี้จะหาซื้อได้ทั่วไป ราคาไม่แพงและใช้อุปกรณ์ไม่มาก
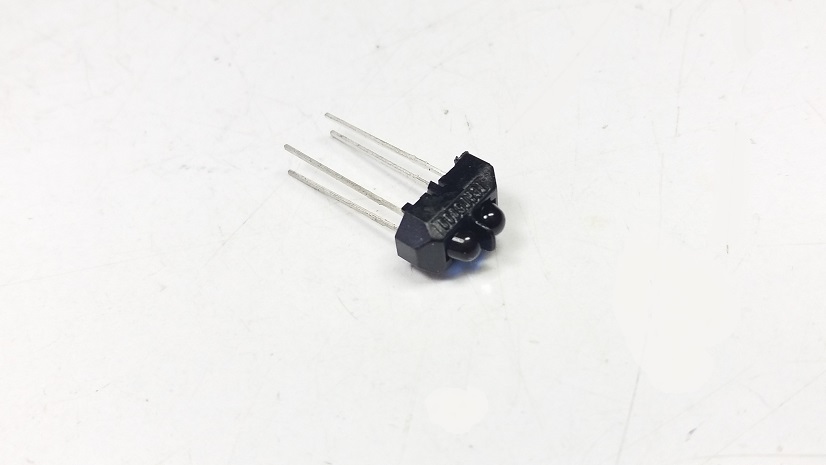
รูปที่ 1 แสดงตัวเซนเซอร์แบบออปติคอลและตัวกำเนิดแสงอิฟราเรดด้วยวิธีการสะท้อน รุ่น TCRT5000 (Reflective Optical Sensor with Transistor Output) ของบริษัท Vishay Semiconductors ซึ่งนำมาใช้ในการสร้างวงจรตัรวจจับความเร็วรอบให้กับมอเตอร์กระแสตรง และเราสามารถดูรายละเอียดเพิ่มเติมได้ตามอ้างอิงที่ 7 [Ref.7]
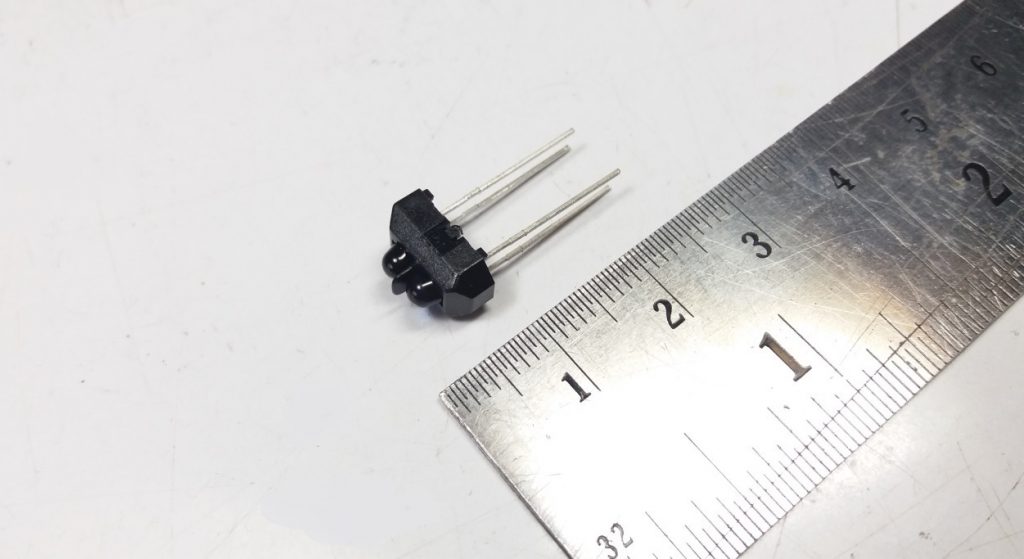
รูปที่ 2 แสดงขนาดของตัวเซนเซอร์แบบออปติคอลเซนเซอร์ที่นำมาใช้งานขนาดเล็ก และสามารถออกแบบวงจรเพื่อนำมาใช้งานร่วมกับชุดฝึกการควบคุมความเร็วมอเตอร์ได้
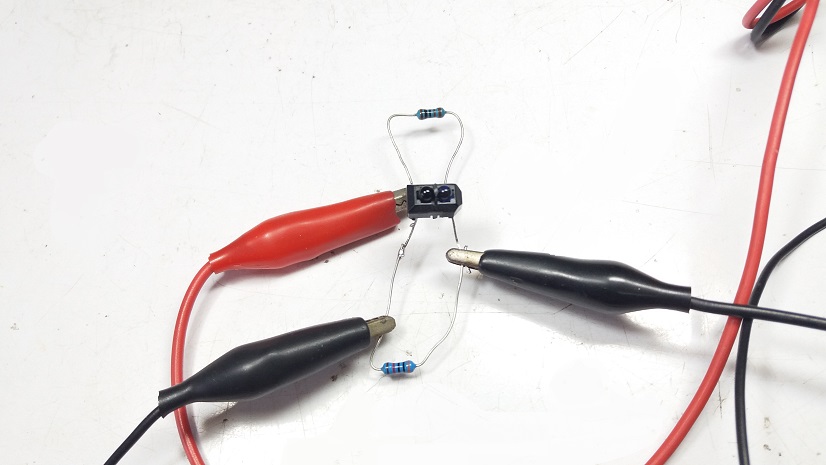
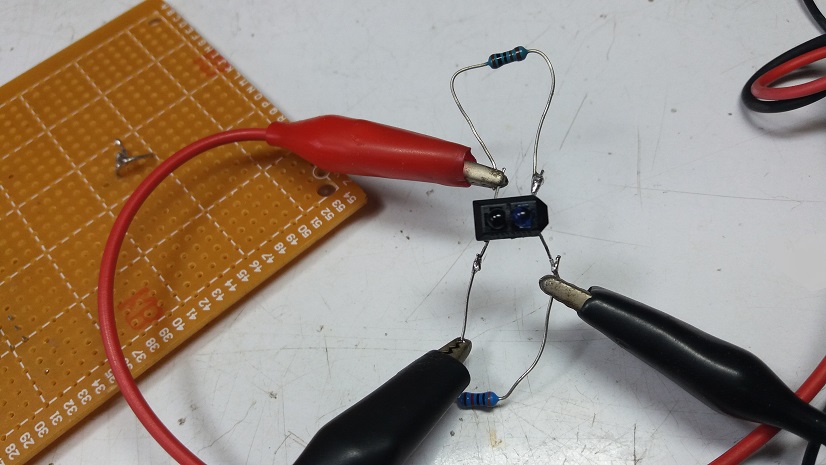
รูปที่ 3 เป็นการทดลองต่อวงจรเบื้องต้น เพื่อศึกษาการนำมาใช้งานได้อย่างถูกต้องและเหมาะสมก่อนนำมาใช้งาน โดยการทดลองเบื้องต้นนี้ ช่วยให้เราสามารถปรับความไว (Sensitivity) ของการตรวจจับสัญญาณและการเลือกอุปกรณ์ที่จะนำมาใช้งานร่วมให้สามารถเชื่อมต่อ (Interface) กับบอร์ดควบคุมได้ถูกต้อง
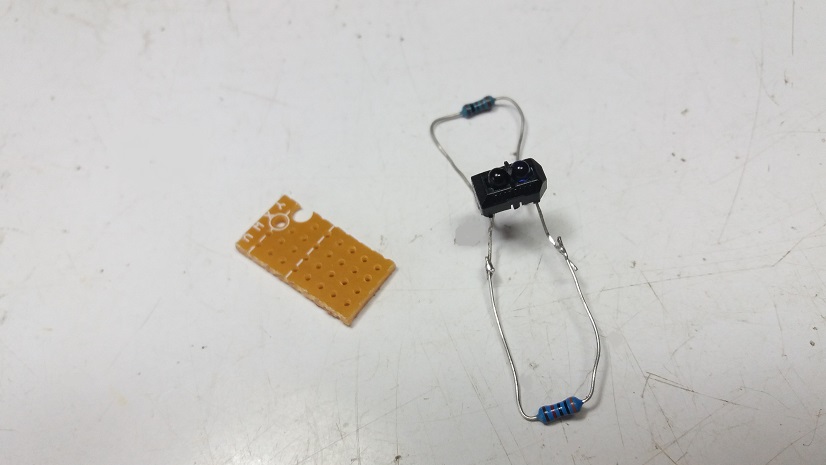
รูปที่ 4 และรูปที่ 5 แสดงการเตรียมแผ่น PCB อเนกประสงค์ เพื่อประกอบวงจรให้เป็นลักษณะของโมดูลและให้ง่ายสำหรับการติดตั้ง โดยในรูปที่ 5 จะเป็นการตัดแผ่น PCB ให้มีขนาดเล็กลงพอดีกับตัวเซนเซอร์
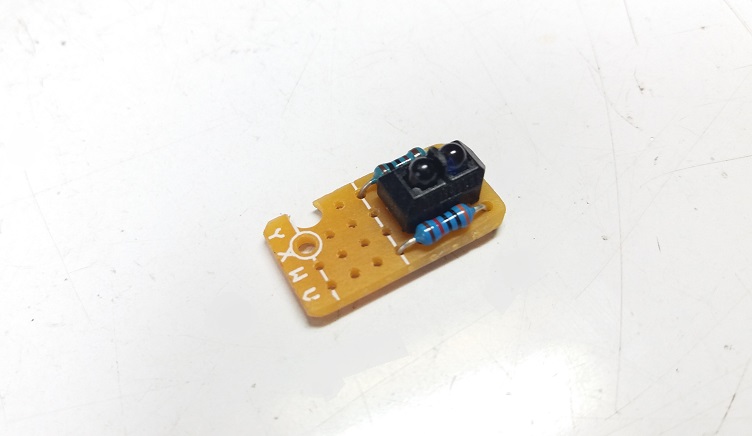
รูปที่ 6 เป็นการประกอบอุปกรณ์ต่างๆ เข้ากับแผ่น PCB และลักษณะของการประกอบเป็นโมดูลเซนเซอร์เพื่อนำไปใช้งาน
รูปที่ 7 แสดงลักษณะของการต่อสายไฟให้กับโมดูลเพื่อใช้ในการรับไฟเลี้ยงให้กับตัวเซนเซอร์ (+5V และ GND ) และส่งสัญญาณที่ตรวจจับความเร็วรอบได้ (OUTPUT) กลับไปยังบอร์ดควบคุมซึ่งจะมีทั้งหมด 3 เส้น
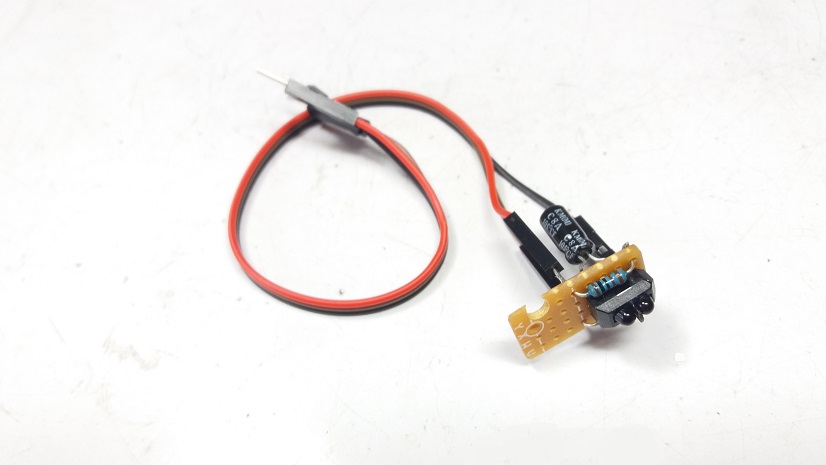
รูปที่ 8 แสดงลักษณะของโมดูลเซนเซอร์ที่ประกอบเสร็จแล้วและสามารถนำไปใช้งานได้
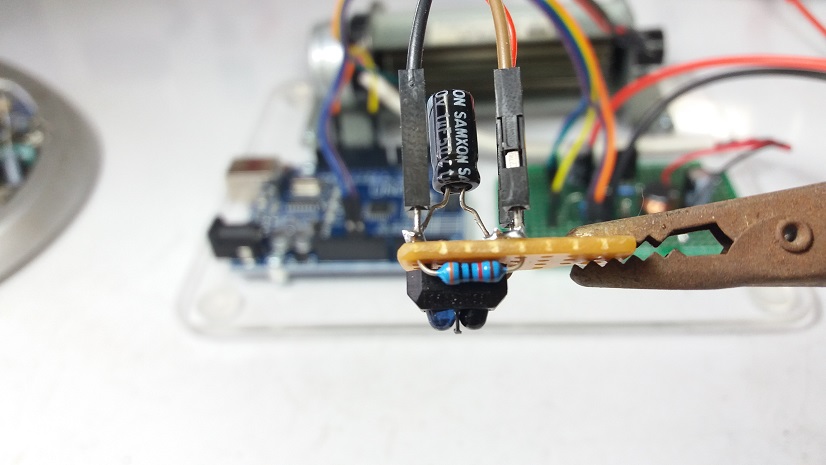
รูปที่ 9 เป็นการประกอบวงจรบางส่วนบนบอร์ดขับมอเตอร์เพิ่มเติม ซึ่งในส่วนนี้จะทำหน้าที่ปรับระดับสัญญาณ (Signal conditioner) ระหว่างสะญญาณที่รับได้จากเซนเซอร์และสัญญาณที่จะส่งไปยังบอร์ดควบคุมให้เป็นไปอย่างเหมาะสม
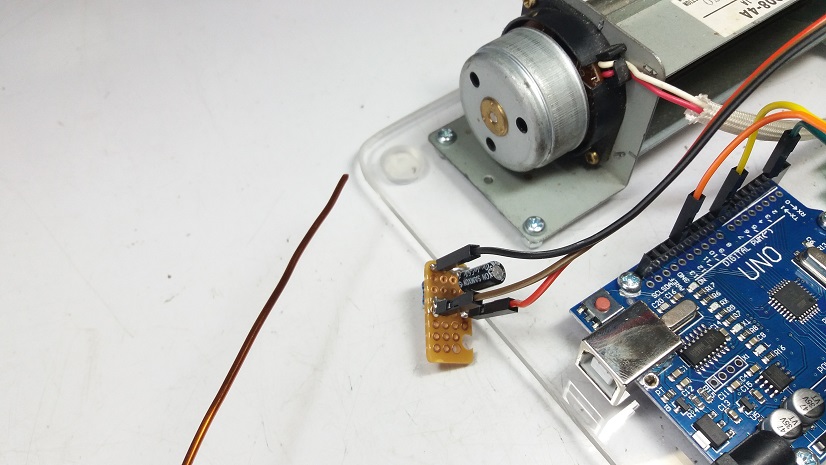
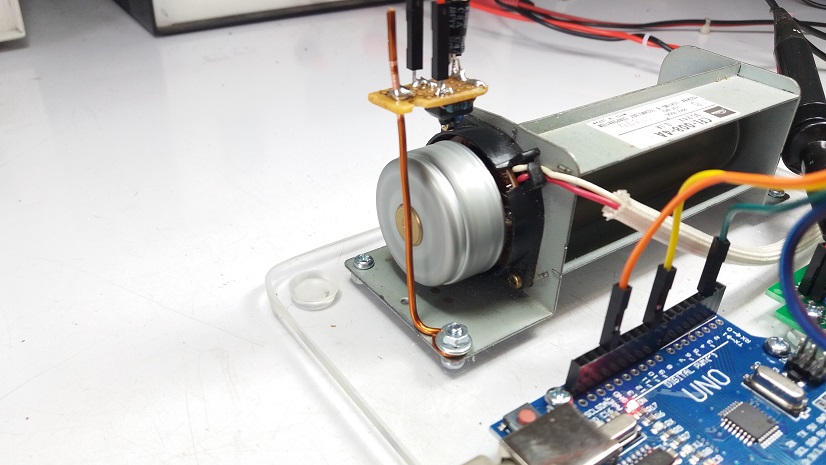
รูปที่ 10 และรูปที่ 11 แสดงลักษณะของการยึดโมดูลเซนเซอร์เข้ากับฐานรับ โดยในที่นี้จะใช้ลวดทองแดงเบอร์ 16 (SWG) ในการยึดทั้งนี้เพราเราสามารถปรับแต่งระยะห่างระหว่างตำแหน่งการตรวจจับและความเอียงรับแถบเซนเซอร์ได้ง่าย เพื่อให้ได้สัญญาณวัดความเร็วรอบที่ถูกต้อง
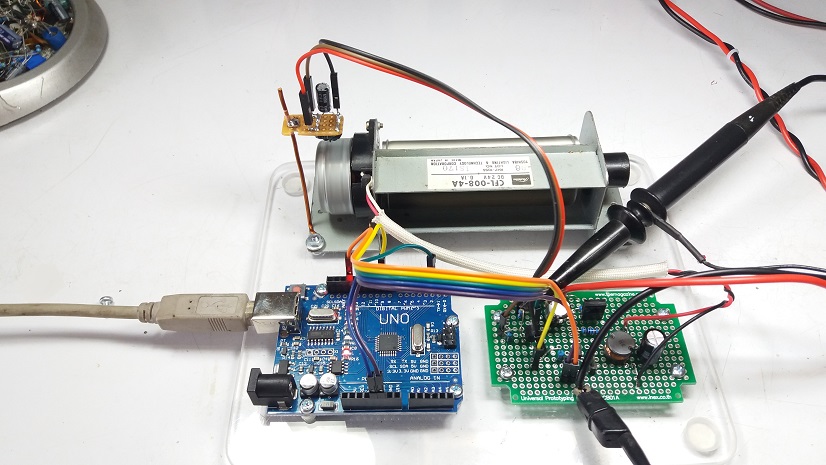
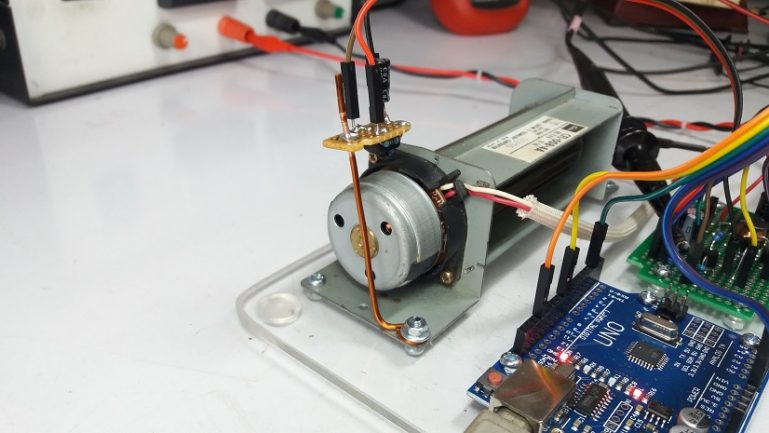
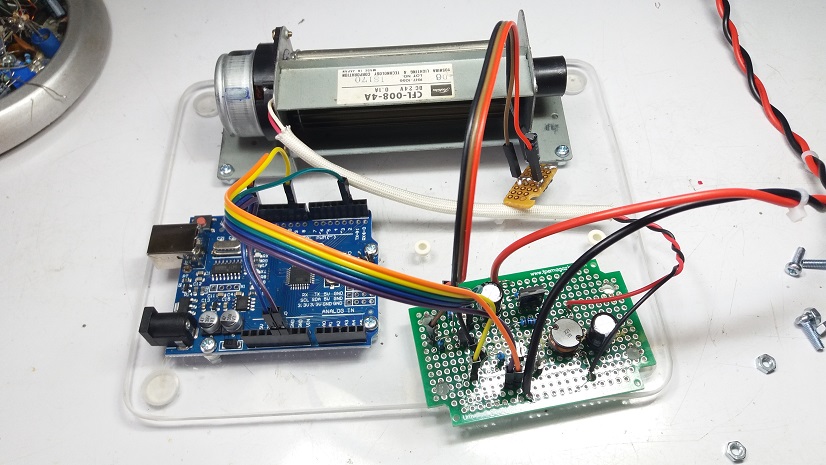
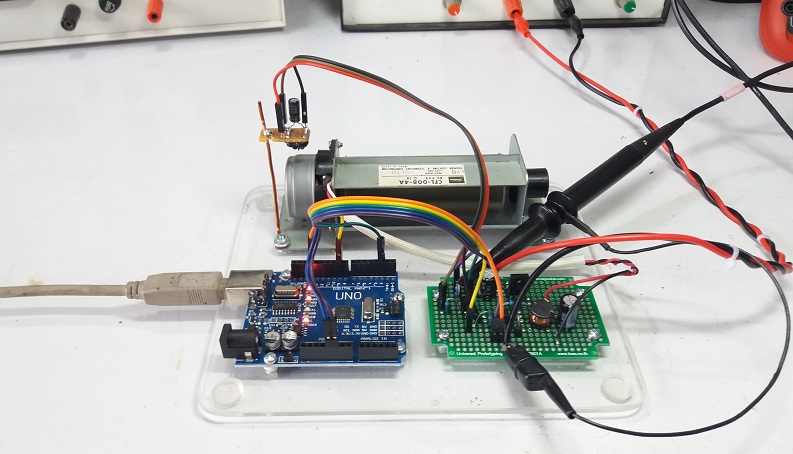
รูปที่ 12 แสดงภาพรวมของการประกอบเข้ากับโครงงานชุดควบคุมความเร็วมอเตอร์ซึ่งใกล้เสร็จสมบูรณ์แล้ว
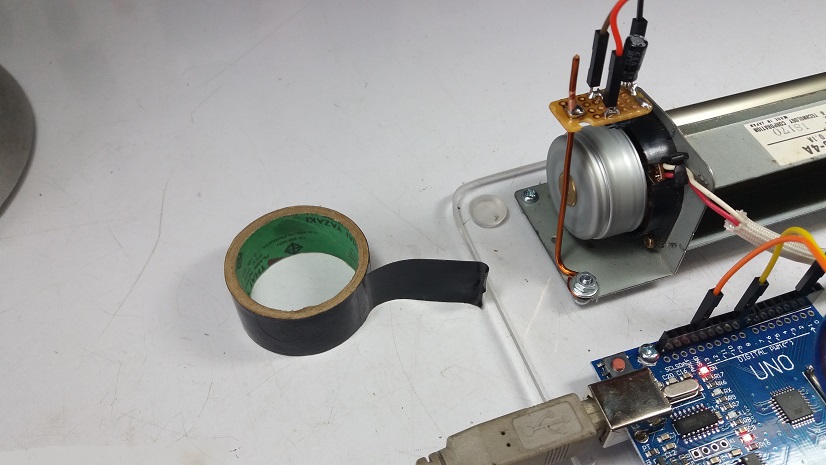
รูปที่ 13 แสดงการใช้เทปพันสายไฟสีดำสำหรับติดเข้ากับตัวโรเตอร์หมุน เพื่อให้เกิดการสร้างสัญาณพัลซ์ในขณะที่หมุน ทั้งนี้เมื่อตัวเซนเซอร์ตรวจจับตรงกับตำแหน่งแถบสีดำก็จะเป็นผลให้สัญญาณทางด้านเอาต์พุตเป็นลอจิก 1 และในทางกลับกันเมื่อไม่เจอแถบสีดำสัญญาณทางด้านเอาต์พุตเป็นลอจิก 0 นั้นเอง
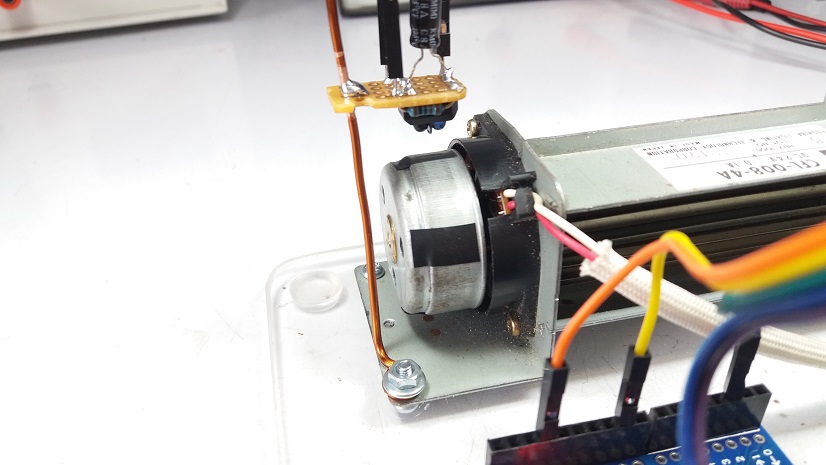
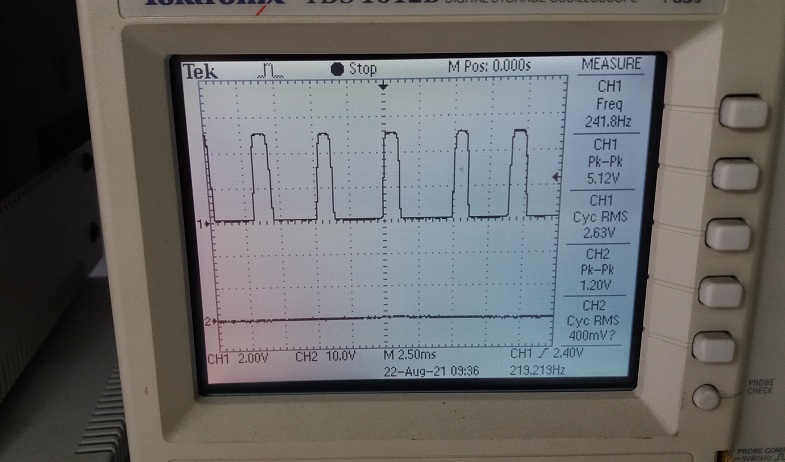
รูปที่ 14 และรูปที่ 15 จะเป็นลักษณะของการติดแถบสีดำให้กับโรเตอร์เป็นที่เรียบร้อยโดยในการทดลองนี้จะติดด้วยกัน 4 จุดในลักษณะตรงข้ามกันและให้ระยะใกล้เคียงกันมากที่สุด และเมื่อทดลองให้มอเตอร์หมุนเราก็จะได้สัญญาณที่เกิดขึ้นในรูปที่ 15 ซึ่งในรูปจะเป็นการวัดสัญญาณที่เอาต์พุตของวงจรตรวจจับความเร็วรอบนี้
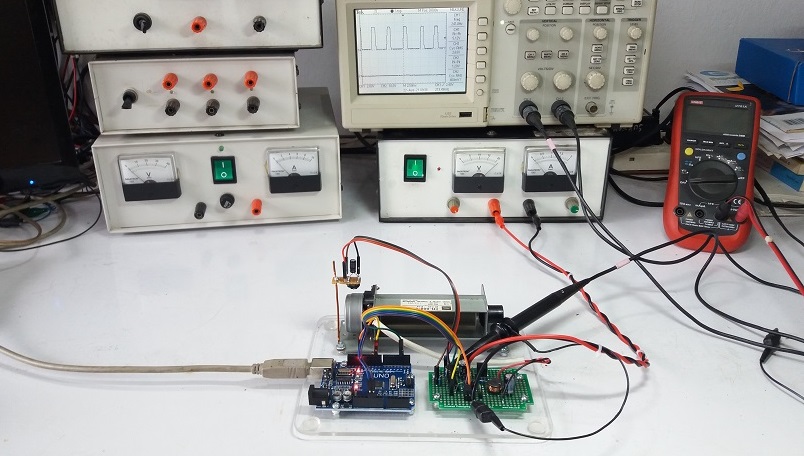
รูปที่ 16 แสดงลักษณะของการวัดสัญญาณและการทดลองเบื้องต้น โดยใช้โปรแกรมการทดลองขับมอเตอร์จากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา
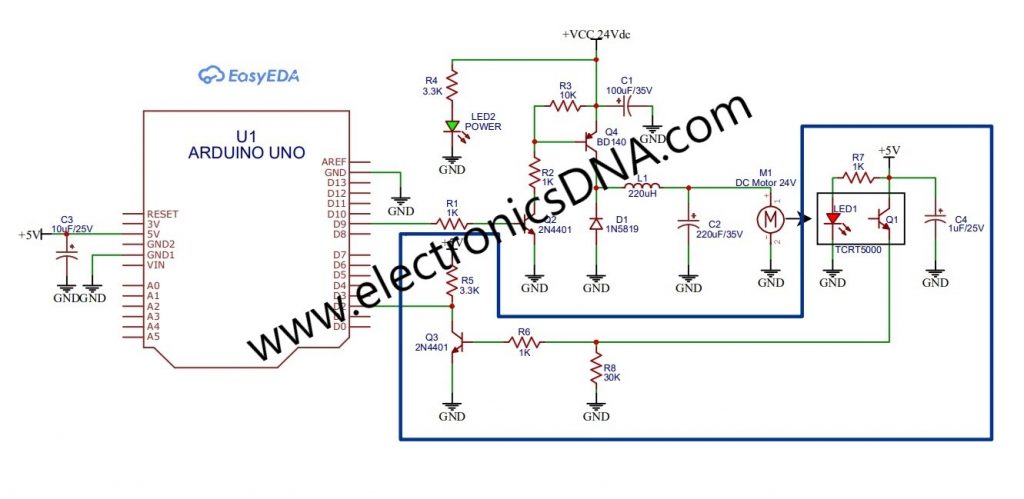
รูปที่ 17 วงจรที่ออกแบบและใช้ในการทดลองโดยส่วนหนึ่งจะเป็นของโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ (นอกกรอบสีน้ำเงิน) โดยในส่วนของกรอบสีน้ำเงินจะเป็นส่วนของการตรวจจับความเร็วรอบมอเตอร์ ซึ่งจะมีตัวออปติคอลเซนเซอร์ (TCRT5000) และทรานซิสเตอร์ (2N4401) ทำงานเป็นหลัก
สำหรับโครงงานสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์นี้เป็นโครงงานเล็กๆ อีกตัวหนึ่งที่ใช้อุปกรณ์น้อยมากในการสร้าง แต่จะใช้เวลาในการปรับแต่งระยะการตรวจจับสัญญาณบ้างเล็กน้อยเพื่อให้ได้สัญญาณที่ถูกต้อง รวมทั้งการหาวิธ๊การยึดโมดูลที่ยืดหยุนต่อการใช้งานในภายหลัง ทั้งนี้การนำตัวเซนเซอร์แบบออปติคอลมาใช้ครั้งนี้คงจะเป็นประโยชน์กับผู้อ่านสำหรับนำไปประยุกต์ใช้งานต่างๆ ได้บ้างครับ.
Reference
- https://www.youtube.com/watch?v=eWo8gdny7tQ
- https://easyeda.com/th
- https://www.mouser.de/pdfdocs/BuckConverterDesignNote.pdf
- https://www.ti.com/lit/an/slva477b/slva477b.pdf?ts=1629531707433&ref_url=https%253A%252F%252Fwww.google.co.th%252F
- https://www.baldengineer.com/pwm-3-pin-pc-fan-arduino.html
- https://for-sale.yowcow.com/listing/130312179/
- https://www.vishay.com/docs/83760/tcrt5000.pdf