
การทดลองนำโรตารี่เอ็นโค้ดเดอร์ (Rotary Encoder) ของ OMRON มาเชื่อมต่อกับ Arduino UNO เพื่อตรวจจับความเร็วและทิศทางการหมุนที่เกิดขึ้น
Electrical and Electronics Learn Everyday
การทดลองนำโรตารี่เอ็นโค้ดเดอร์ (Rotary Encoder) ของ OMRON มาเชื่อมต่อกับ Arduino UNO เพื่อตรวจจับความเร็วและทิศทางการหมุนที่เกิดขึ้น
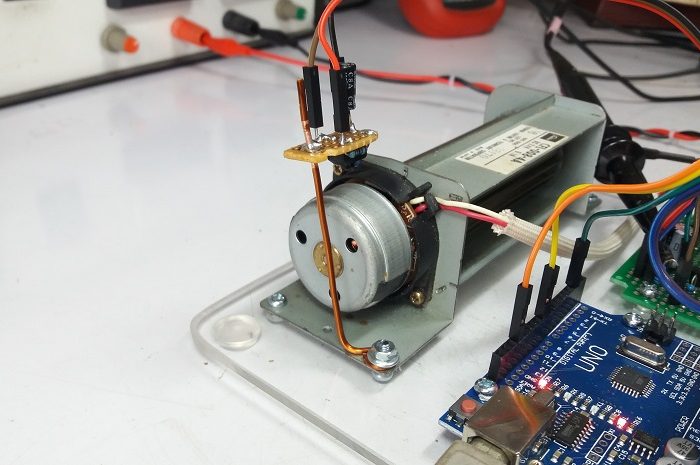
สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์กันต่อครับ.
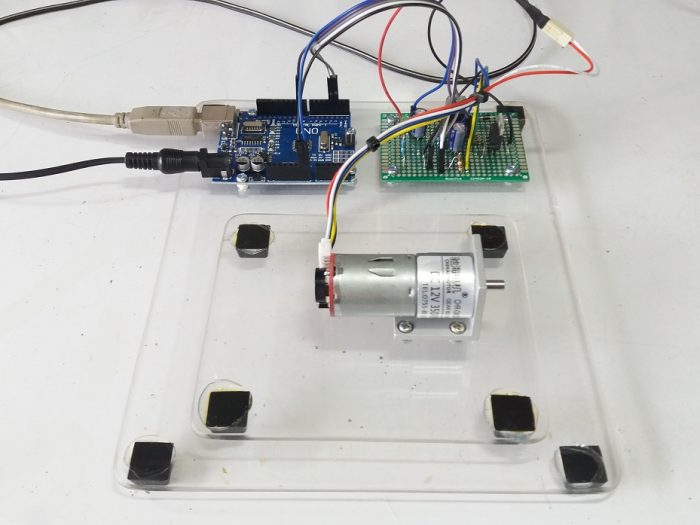
การควบคุมความเร็วให้กับมอเตอร์ไฟฟ้ากระแสตรง (DC Motor) ด้วย PID Control และป้อนกลับสัญญาณด้วย Rotary encoder