สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์กันต่อครับ.
Electrical and Electronics Learn Everyday
สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์กันต่อครับ.
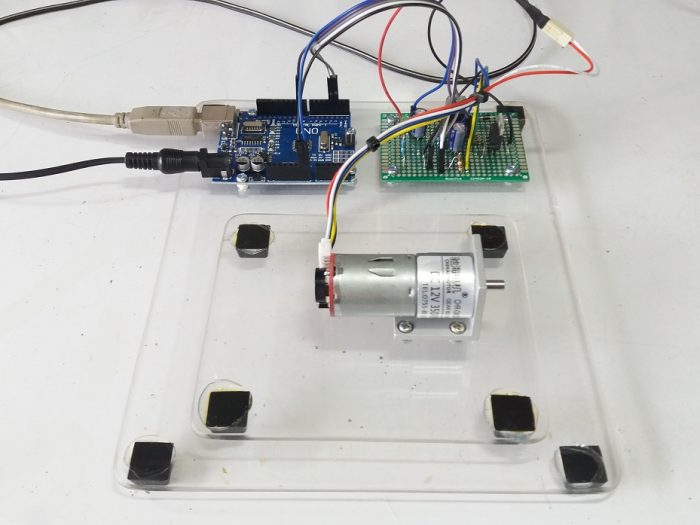
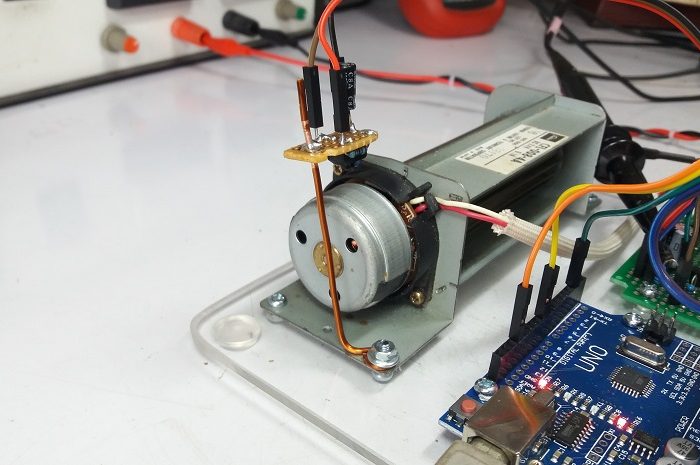
การควบคุมความเร็วให้กับมอเตอร์ไฟฟ้ากระแสตรง (DC Motor) ด้วย PID Control และป้อนกลับสัญญาณด้วย Rotary encoder
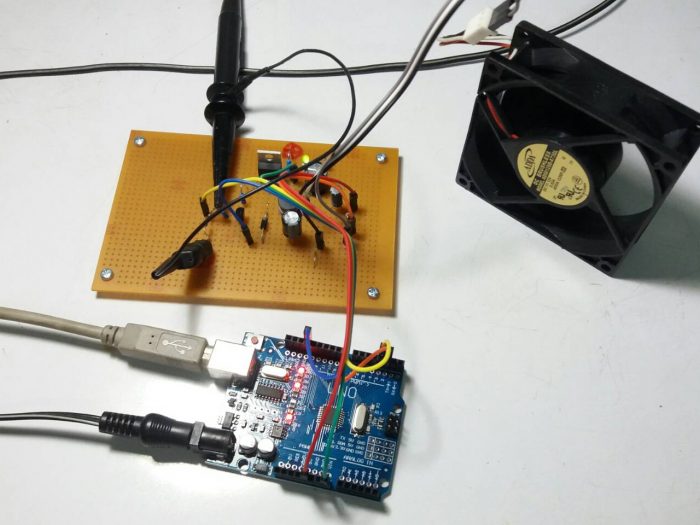
การควบคุมความเร็วพัดลมขนาดเล็กด้วยฟัซซี่ลอจิก โดยรับสัญญาณป้อนกลับ (Tachogenerator signal) ภายในตัวพัดลมและใช้ตัวประมวลผล Arduino UNO