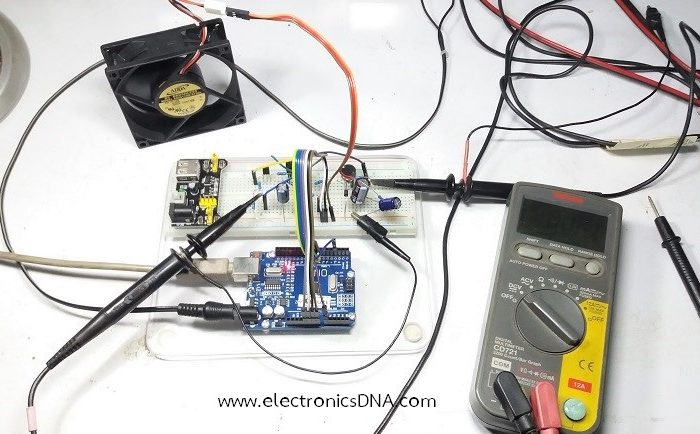
โครงงานนี้เป็นการทดลองและเรียนรู้เบื้องต้น กับการควบคุม PID Adaptive Tuning โดยการปรับความเร็วรอบของพัดลมขนาดเล็กเพื่อสังเกตการทำงานของระบบ
Electrical and Electronics Learn Everyday
โครงงานนี้เป็นการทดลองและเรียนรู้เบื้องต้น กับการควบคุม PID Adaptive Tuning โดยการปรับความเร็วรอบของพัดลมขนาดเล็กเพื่อสังเกตการทำงานของระบบ
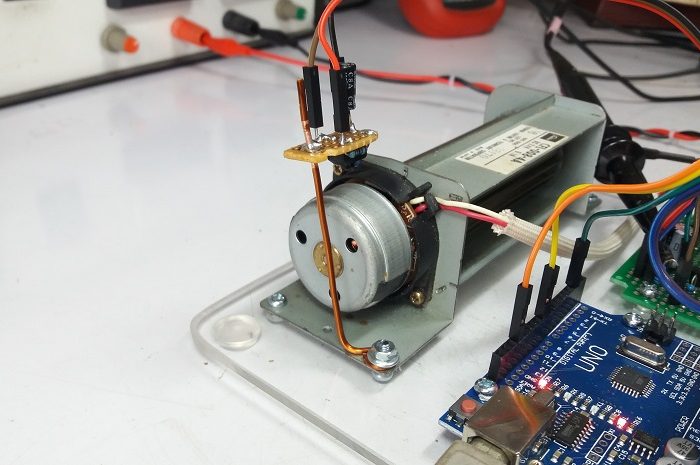
สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์กันต่อครับ.
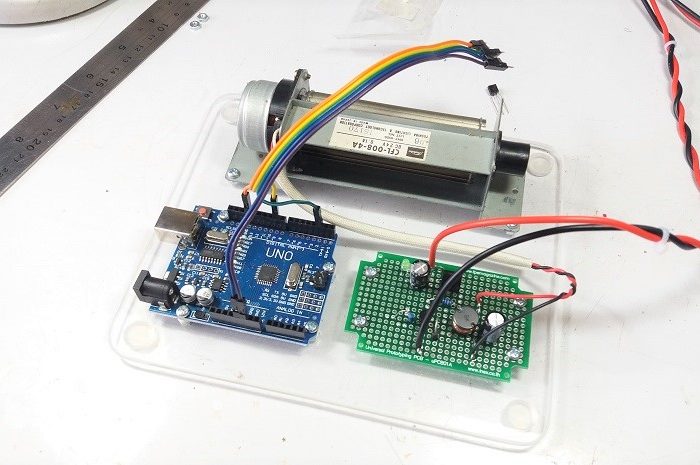
โครงงานนี้เป็นการสร้างชุดฝึกควบคุมความเร็วมอเตอร์กระแสตรง (DC Motor) ขนาดเล็ก ร่วมกับบอร์ดขับมอเตอร์ที่ออกแบบเพิ่มและบอร์ดควบคุม Arduino UNO
การควบคุมความเร็วให้กับมอเตอร์ไฟฟ้ากระแสตรง (DC Motor) ด้วย PID Control และป้อนกลับสัญญาณด้วย Rotary encoder
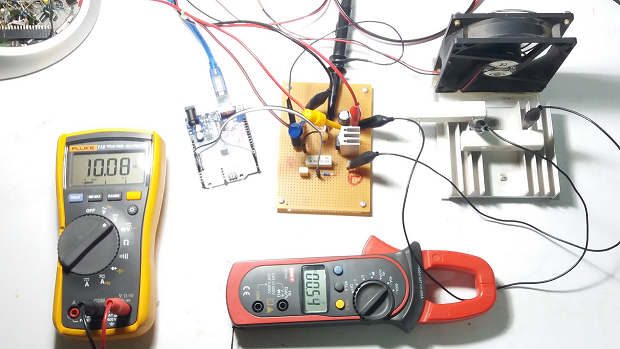
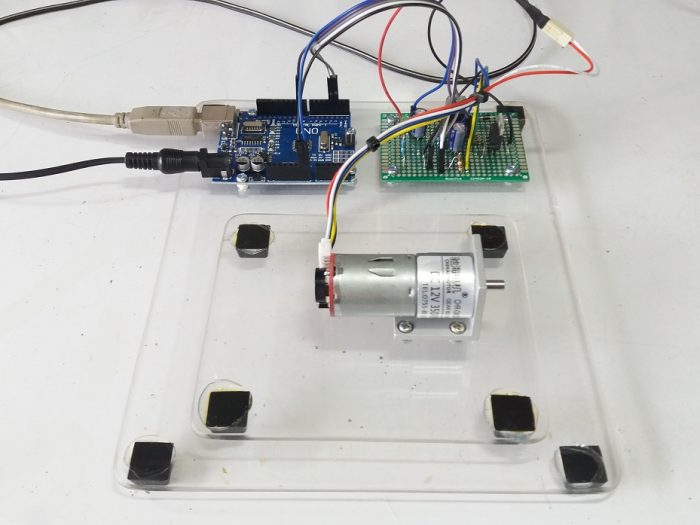
โครงงานนี้เป็นการทดลองเบื้องต้น สำหรับควบคุมแบบปิดด้วย PID Control ด้วยการควบคุมกระแสให้คงที่ โดยใช้ตัวควบคุม Arduino UNO รับสัญญาณป้อนกลับแบบอะนาลอก (ขา A0) และส่งสัญาณปรับค่ากระแสแบบ PWM (ขา D3)
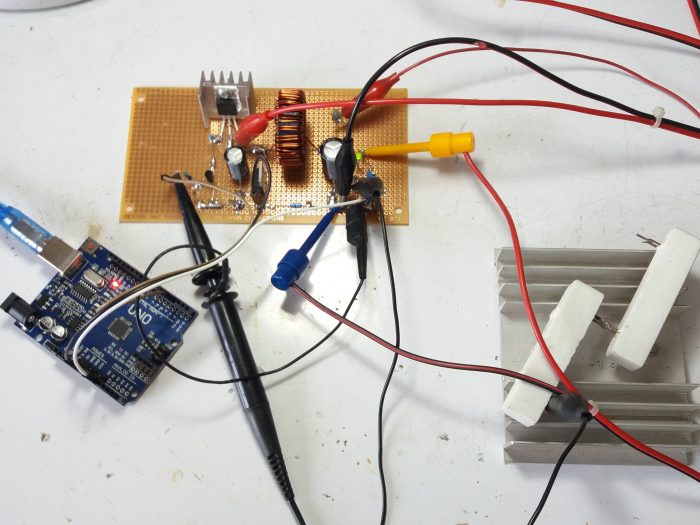
วงจรบักคอนเวอร์เตอร์แบบสวิตชิ่ง (Switching Buck Converter) ควบคุมด้วยไมโครคอนโทรลเลอร์ Arduino UNO โปรแกรมควบคุมแบบปิด (Closed-Loop control) ด้วย PID Control