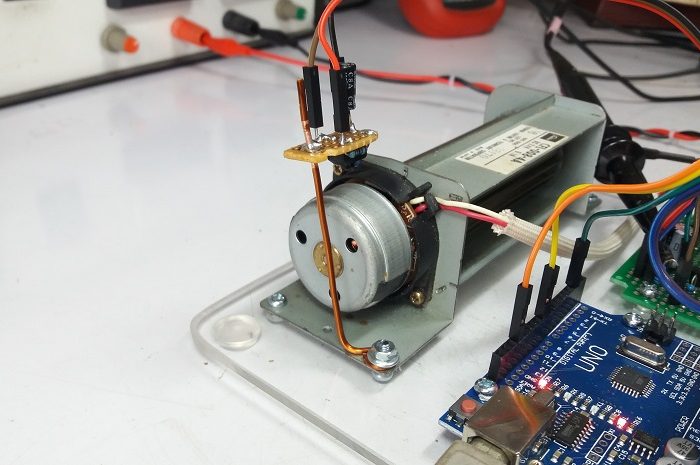
สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์กันต่อครับ.
Electrical and Electronics Learn Everyday
สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์กันต่อครับ.
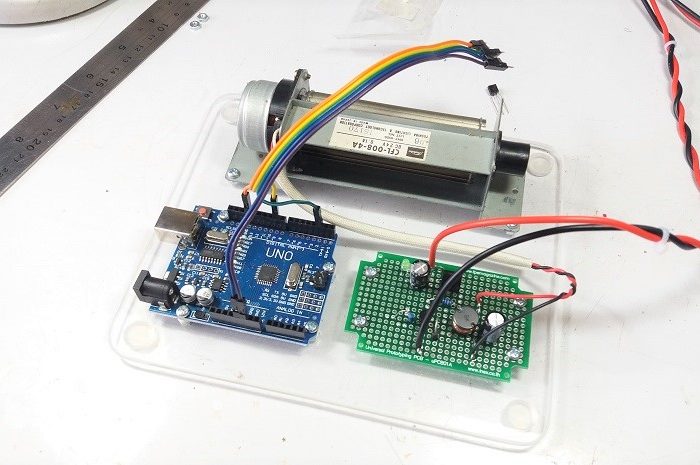
โครงงานนี้เป็นการสร้างชุดฝึกควบคุมความเร็วมอเตอร์กระแสตรง (DC Motor) ขนาดเล็ก ร่วมกับบอร์ดขับมอเตอร์ที่ออกแบบเพิ่มและบอร์ดควบคุม Arduino UNO
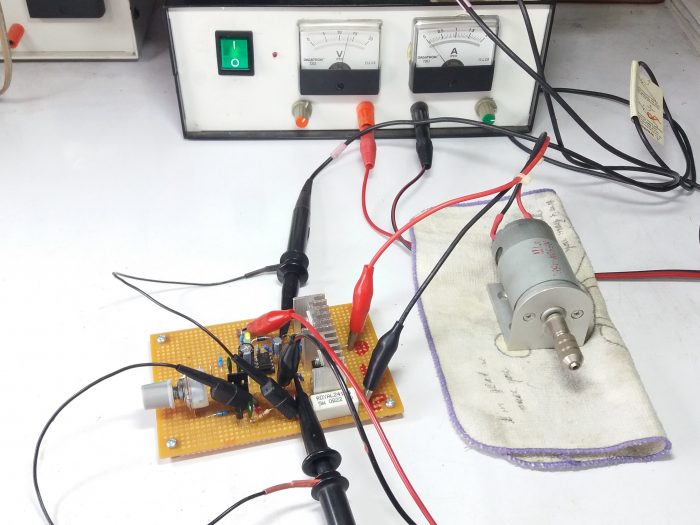
โครงงานนี้เป็นการควบคุมความเร็วมอเตอร์กระแสตรงด้วยไอซี IR2153 แบบ Half-bridge DC motor drives ซึ่งเป็นเทคนิคการขับมอเตอร์กระแสตรงอีกแบบหนึ่งครับ.
การควบคุมความเร็วให้กับมอเตอร์ไฟฟ้ากระแสตรง (DC Motor) ด้วย PID Control และป้อนกลับสัญญาณด้วย Rotary encoder
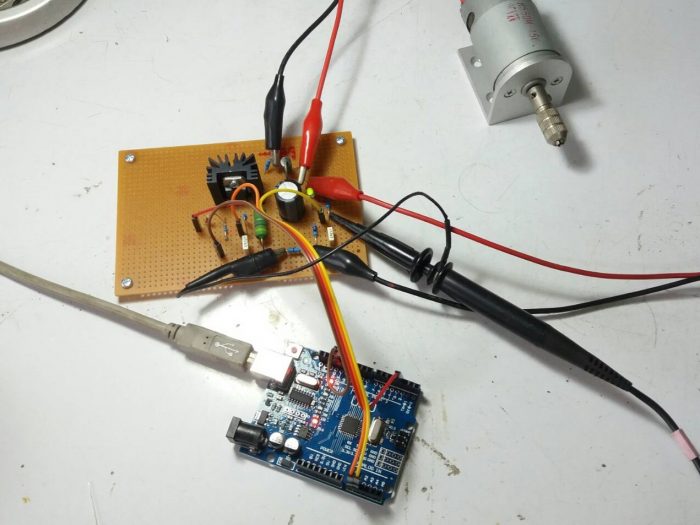
การควบคุมความเร็วมอเตอร์กระแสตรง (DC Motor) โดยใช้สัญญาณค่าแรงดันย้อนกลับ (Back-EMF) ของตัวมอเตอร์ในการป้อนกลับ (Feedback) เพื่อให้เราสามารถควบคุมความเร็วได้คงที่
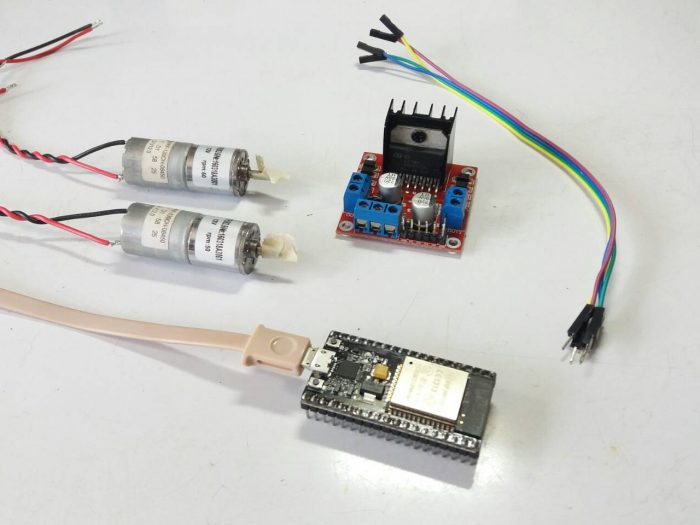
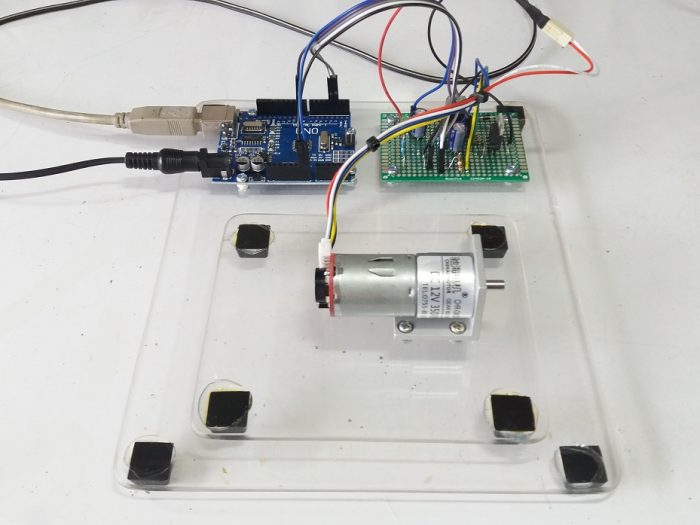
โครงงานนี้จะเป็นการควบคุม DC Motor โดยใช้บอร์ฺด ESP32 Devkit จำนวน 2 ช่อง ซึ่งเป็นการทดลองเบื้องต้น สำหรับการควบคุมระหว่างบอร์ด ESP32 Devkit กับ L298 Module