
โครงงานนี้เป็นการสร้างฐานรับให้กับมอเตอร์กระแสตรงขนาด 24V/300 วัตต์ เพื่อใช้ในการทดลองขับมอเตอร์กระแสสูงขึ้น จากเดิมที่ได้นำเสนอโครงงานที่ผ่านมาครับ.
Electrical and Electronics Learn Everyday
โครงงานนี้เป็นการสร้างฐานรับให้กับมอเตอร์กระแสตรงขนาด 24V/300 วัตต์ เพื่อใช้ในการทดลองขับมอเตอร์กระแสสูงขึ้น จากเดิมที่ได้นำเสนอโครงงานที่ผ่านมาครับ.
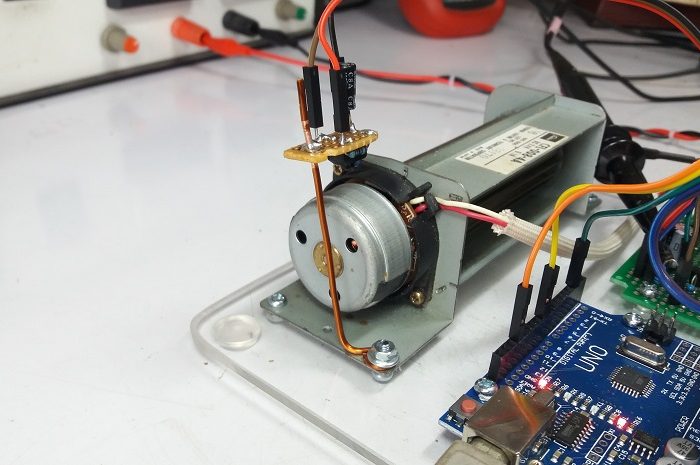
สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์กันต่อครับ.
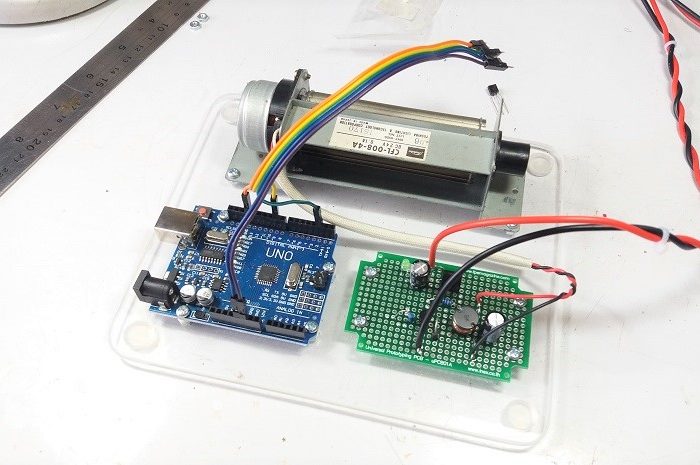
โครงงานนี้เป็นการสร้างชุดฝึกควบคุมความเร็วมอเตอร์กระแสตรง (DC Motor) ขนาดเล็ก ร่วมกับบอร์ดขับมอเตอร์ที่ออกแบบเพิ่มและบอร์ดควบคุม Arduino UNO
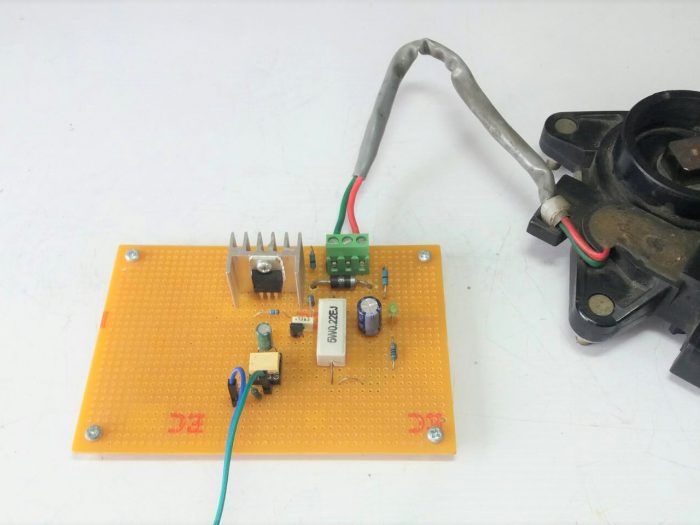
บทความนี้นำเสนอการป้องกันกระแสเกิน (Over current Protection) ให้กับมอเตอร์กระแสตรง (DC motor) และชุดขับกำลัง (Power Stage Drive) เบื้องต้นครับ.
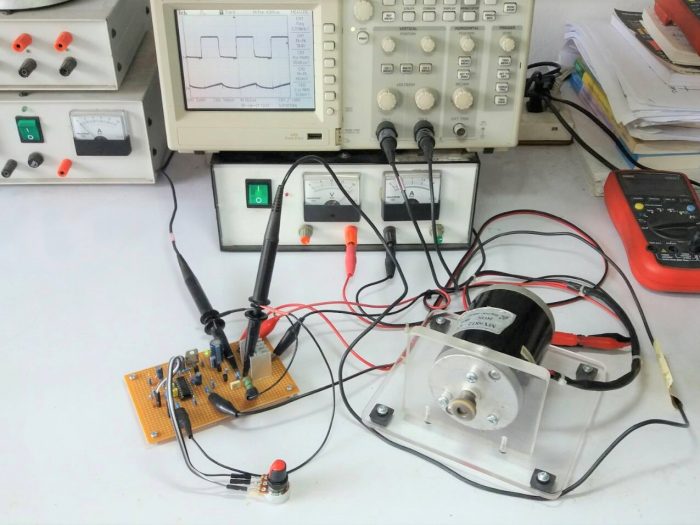
โครงงานนี้เป็นการพัฒนาต่อเนื่อง สำหรับการควบคุมมอเตอร์กระแสตรงด้วยไอซีเบอร์ TL494 ซึ่งในเวอร์ชั่น 2 นี้จะเป็นการปรับปรุงจากเวอร์ชั่น 1 ให้สามารถควบคุมความเร็วรอบแบบปิด ด้วยการรับสัญญาณป้อนกลับจากตัวมอเตอร์ (Process Value : PV) เข้ามาควบคุมด้วยออปแอมป์ และค่ากำหนดความเร็ว (Set Point : SP)
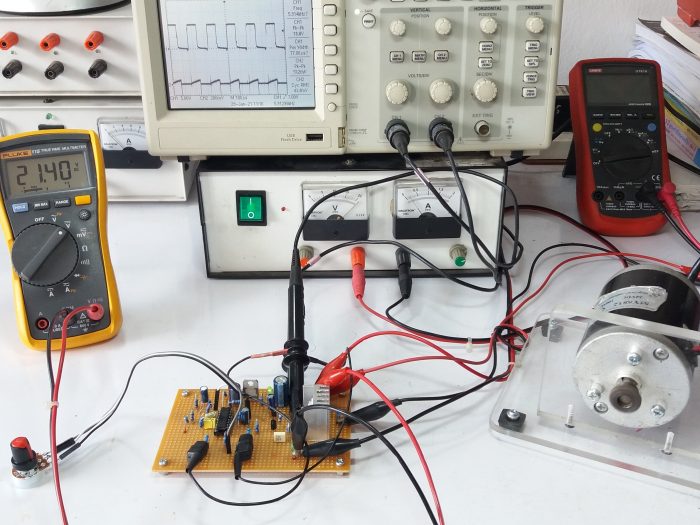
โครงงานนี้เป็นการควบคุมมอเตอร์กระแสตรงขนาด 24V, 100W แบบอะนาลอกด้วยไอซีเบอร์ TL494 กับลักษณะการควบคุมแบบเปิด (Open Loop Control) กำหนดความถี่ PWM ที่ 6kHz จำกัดกระแสมอเตอร์ 5A และใช้ไฟเลี้ยงทดสอบ 21VDC
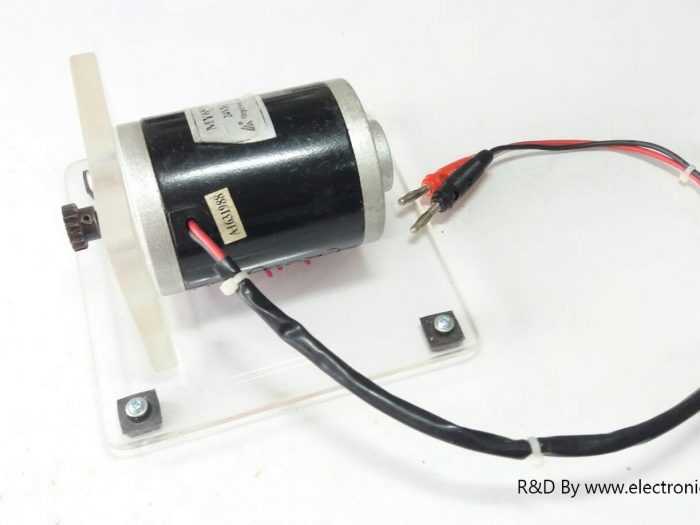
โครงงานนี้เป็นการทำฐานยึดให้กับตัวดีซีมอเตอร์ (DC motor mounting base) สำหรับใช้ในการทดลองต่างๆ เช่น การควบคุมความเร็ว (Speed Control) และแรงบิด (Torque control) ของตัวมอเตอร์ชนิดนี้กันครับ