Prototype board DC-DC Synchronous Buck Converter for Maximum Power Point Tracking : MPPT

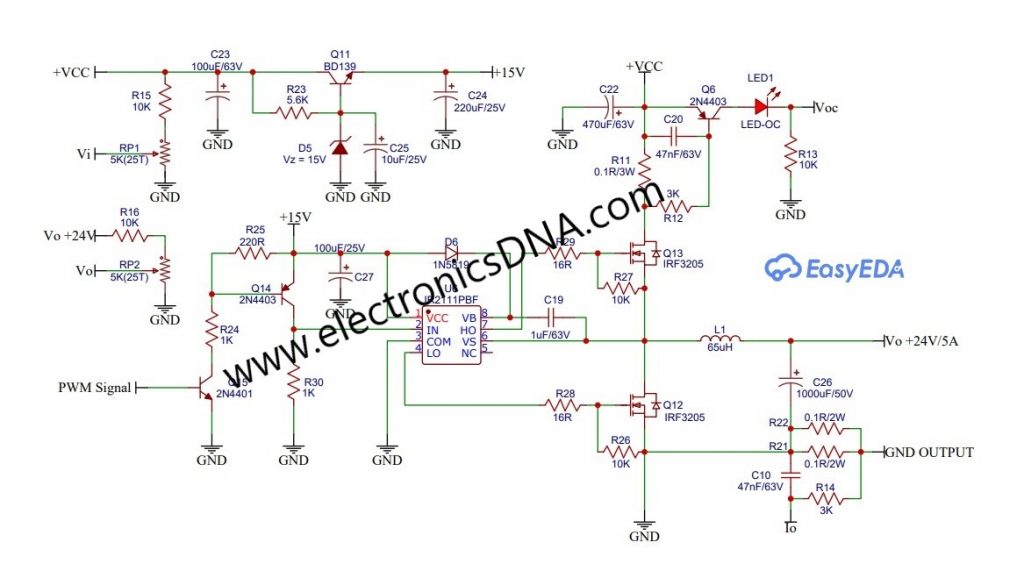
โครงงานนี้เป็นการทดลองออกแบบวงจรซิงโครนัสบักคอนเวอร์เตอร์ขนาดเล็ก สำหรับเชื่อมต่อกับบอร์ดไมโครคอนโทรลเลอร์ต่างๆ เพื่อการชาร์จแบตเตอรี่ในแบบ Maximum Power Point Tracking : MPPT โดยสามารถรับไฟเลี้ยงอินพุตได้ในช่วง 30V-55V แรงดันเอาต์พุตที่ 24V/5A สามารถตรวจจับแรงดันและกระแสทางด้านอินพุต/เอาต์พุตได้ และรับสัญญาณควบคุมการชาร์จแบบพัลซ์วิดธ์มอดูเลตชั่นเพียง 1 ช่อง
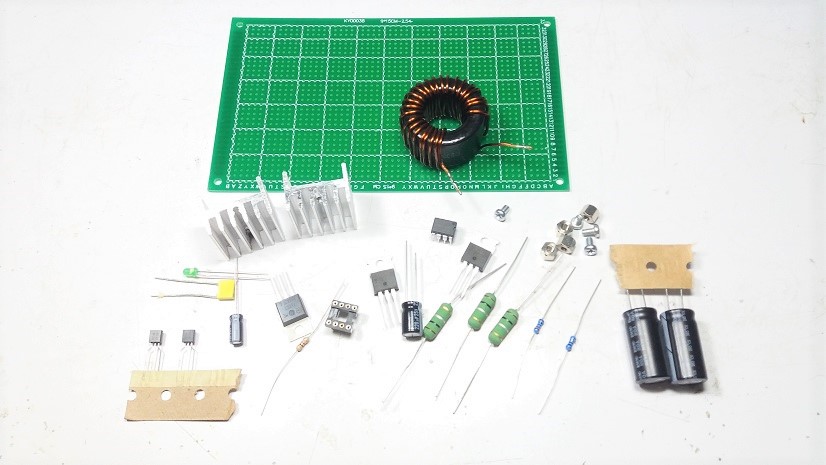
รูปที่ 1 และรูปที่ 2 แสดงการเตรียมอุปกรณ์ต่างๆ สำหรับประกอบวงจรซิงโครนัสบักคอนเวอร์เตอร์ โดยจะประกอบบนแผ่นวงจรพิมพ์ (PCB) อเนกประสงค์ทั้งหมดเพื่อตัวบอร์ดให้สามารถ รับ/ส่ง สัญญาณควบคุมต่างๆ เช่น การรับค่าแรงดันและกระแสทางด้านอินพุตรวมทั้งเอาต์พุต การส่งสัญญาณพัลซ์วิดธ์มอดูเลตชั่น เป็นต้น
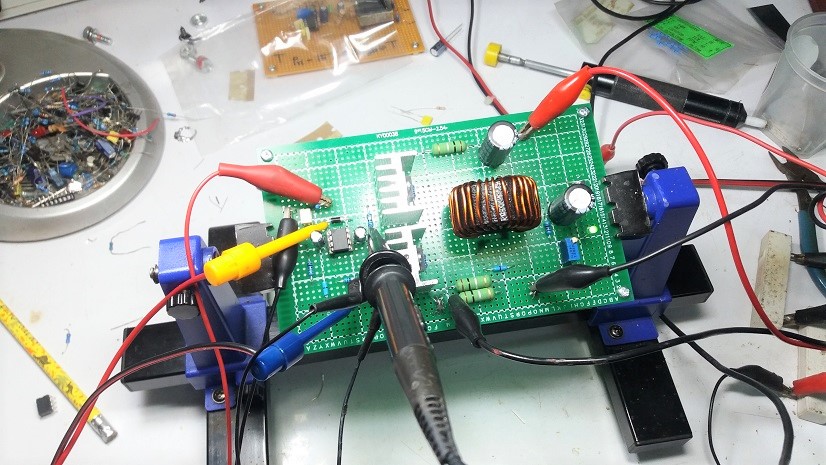
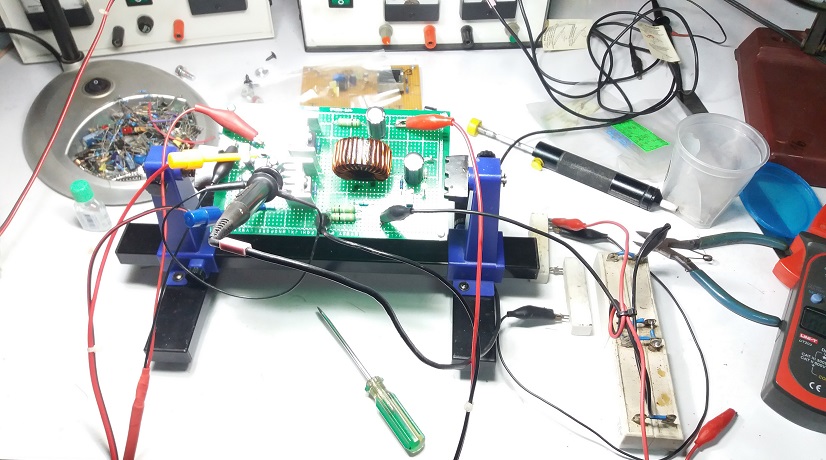
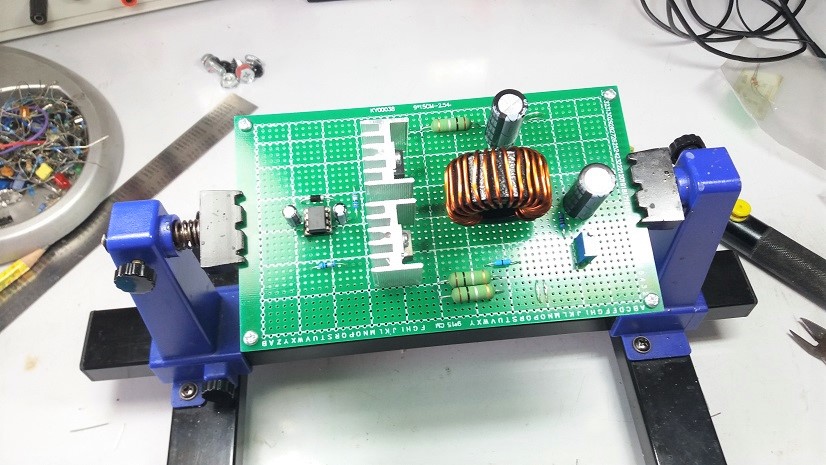
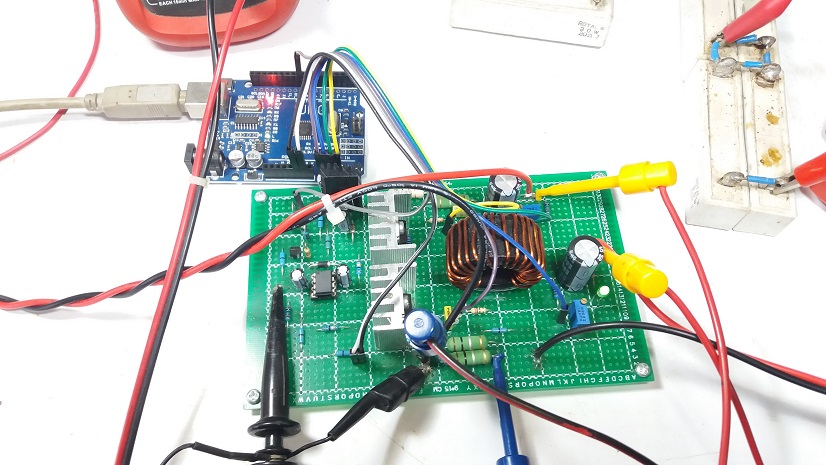
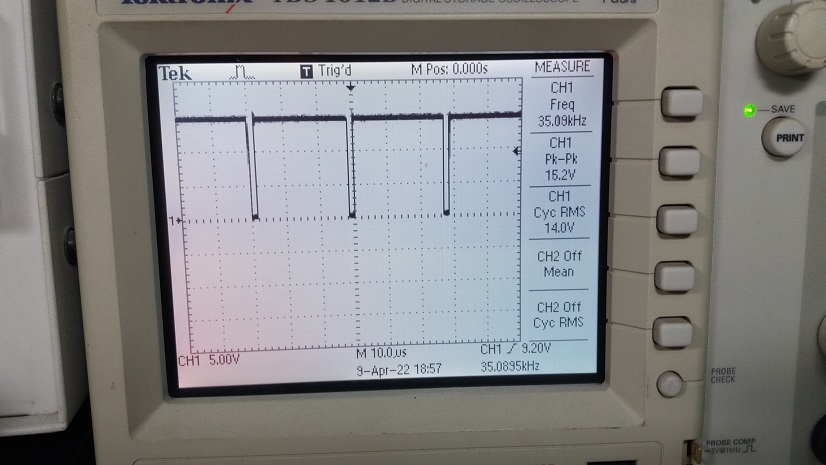
รูปที่ 3 และรูปที่ 4 แสดงลักษณะของบอร์ดที่ประกอบวงจรซิงโครนัสบักคอนเวอร์เตอร์ และการเตรียมทดลองเบื้องต้น โดยในขั้นตอนนี้จะทดลองจ่ายไฟเลี้ยงที่ประมาณ 55V เพื่อสังเกตการทำงานวงจรเรกูเลต วงจรขับสัญญาณที่ขาเกตให้กับเพาเวอร์มอสเฟตในเบื้องต้น และจะนำไปทดลองการทำงานร่วมกับโปรแกรมอีกครั้งในขั้นตอนทดลองถัดไป
/*
The library allows for a frequency range from 1Hz - 2MHz on 16 bit timers and 31Hz - 2 MHz on 8 bit timers.
MCU : Arduino UNO
Dev by : www.electronicsdna.com
Date : 9-4-2022
*/
#include <PWM.h>
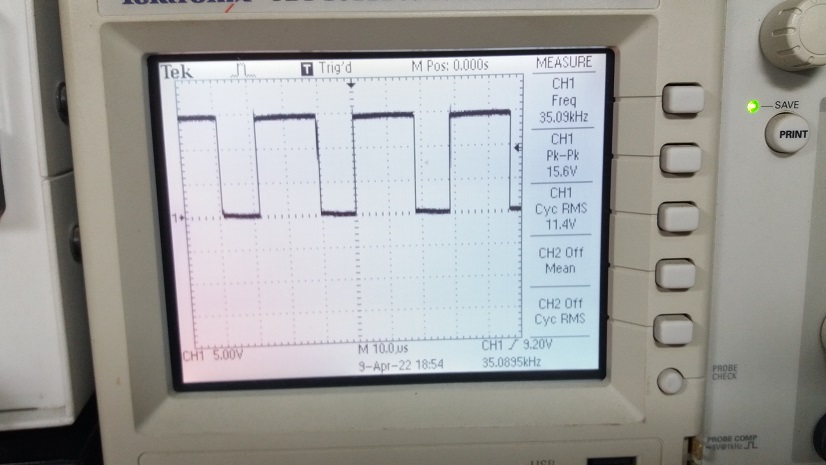
int32_t frequency = 35000; //frequency (in Hz)
void setup()
{
//initialize all timers except for 0, to save time keeping functions
InitTimersSafe();
Serial.begin(9600);
//sets the frequency for the specified pin
bool success = SetPinFrequencySafe(9,frequency);
//if the pin frequency was set successfully,turn pin 13 on
if(success) {
pinMode(13,OUTPUT);
digitalWrite(13, HIGH);
}
}
void loop()
{
int PWMset = 75; //@30%
// int PWMset = 150; //@60%
// int PWMset = 230; //@90%
pwmWrite(9,PWMset);
delay(100);
}
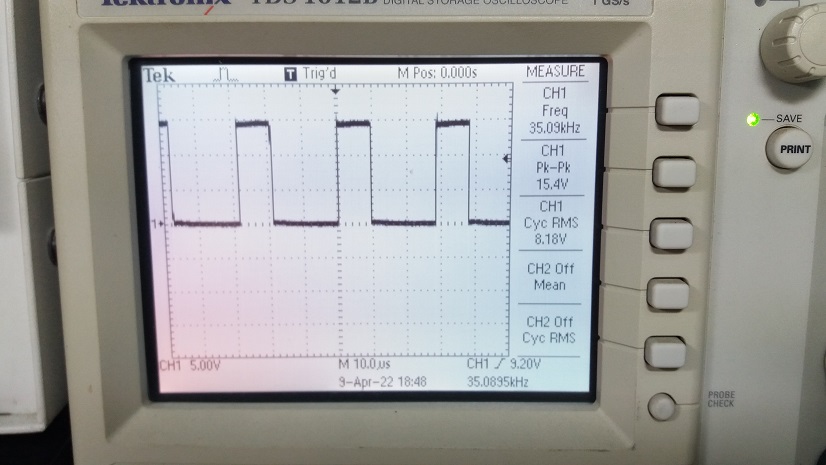
โปรแกรมสำหรับใช้ในทดลองการทำงานวงจรซิงโครนัสบักคอนเวอร์เตอร์ที่แสดงข้างบน จะใช้ในการปรับสัญญาณพัลซ์วิดธ์มอดูเลตชั่นที่ขา D9 โดยใช้การลบคำสั่งคอมเม้นออก (//) ที่ด้านหน้าเช่น ที่ตำแหน่ง int PWMset = 75; //@30% ซึ่งหมายความว่าเราจะให้คำสั่งนั้นถูกใช้งาน และส่งไปยังขาเอาต์พุต D9 ด้วยคำสั่ง pwmWrite(9,PWMset); โดยเราสามารถปรับค่าสัญญาณพัลซ์วิดธ์มอดูเลตชั่นต่างๆ เพื่อทดลองและสังเกตการทำงานได้ง่ายขึ้น
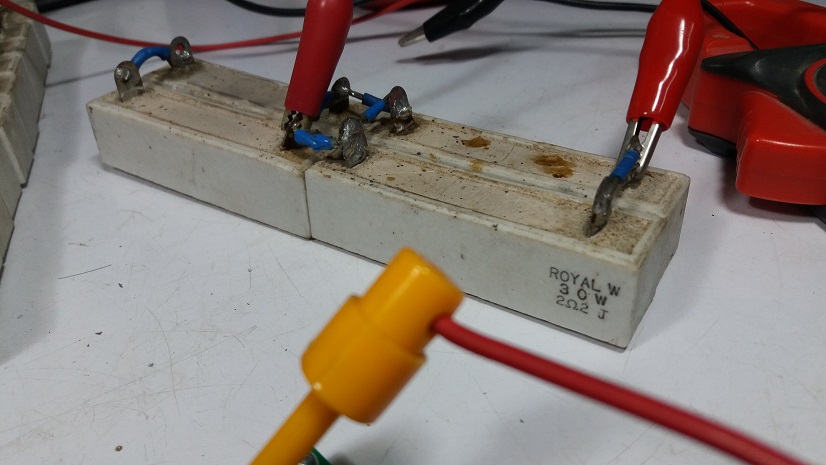
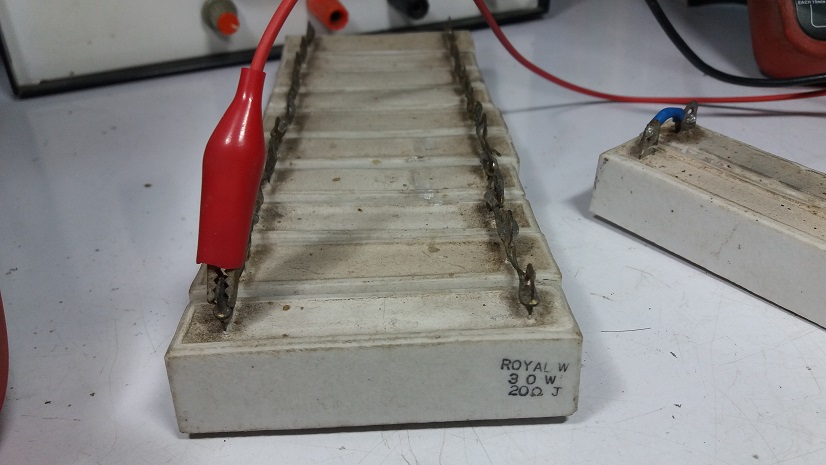
รูปที่ 6 และรูปที่ 7 เป็นโหลดตัวต้านทานค่าคงที่และยังมีอีส่วนหนึ่งสำหรับใช้ในการทดสอบการทำงานของวงจรซิงโครนัสบักคอนเวอร์เตอร์ โดยการทดสอบการทำงานจะใช้การต่ออนุกรม ขนานหรือการต่อผสม เพื่อให้กระที่ไหลผ่านโหลดมากกว่า 5A สำหรับเป็นการทดลองความสามารถในการจ่ายกระแสตามที่ระบุการทำงานในเบื้องต้น
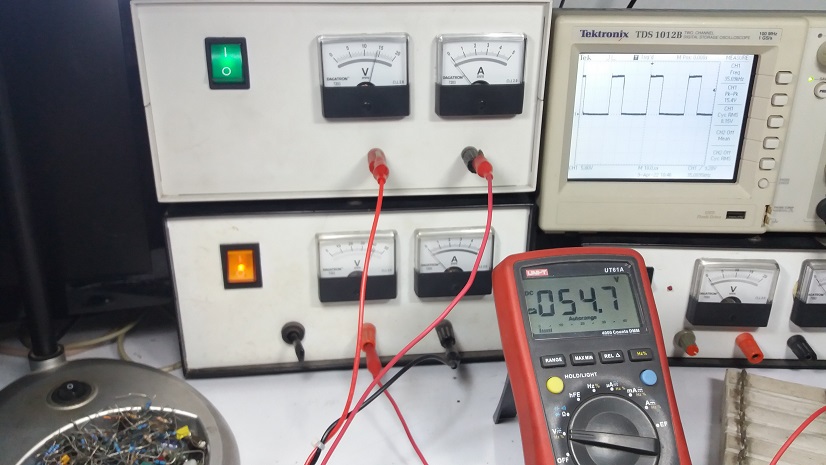

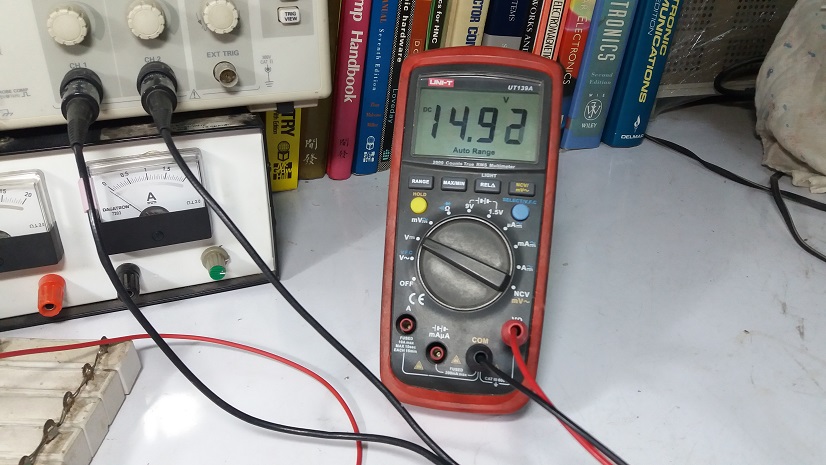
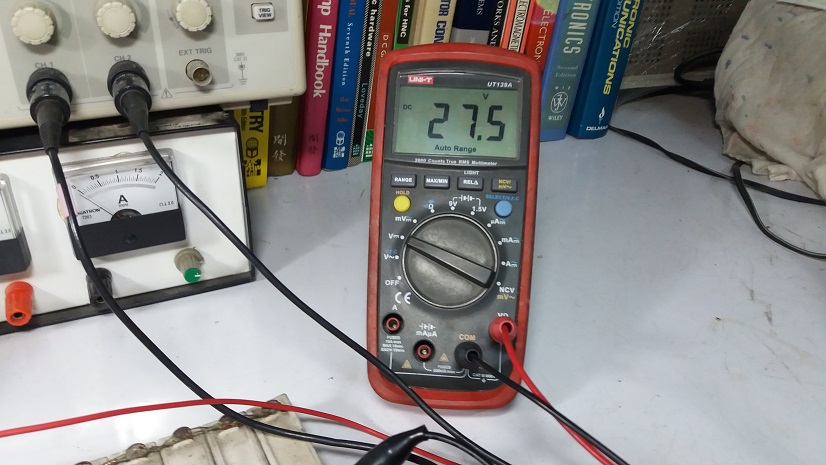
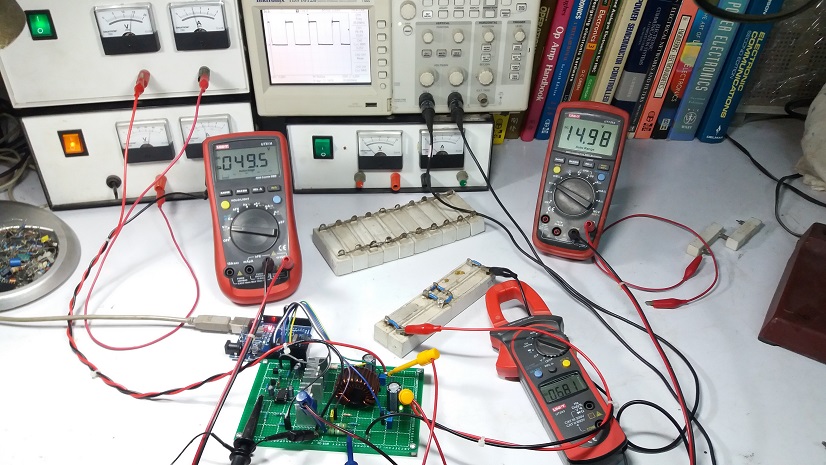
สำหรับในรูปที่ 10 ถึงรูปที่ 14 เป็นการทดลองที่ 1 โดยการกำหนด PWM = 30% เพื่อสังเกตการทำงานและผลที่ได้จากการทดลอง โดยในรูปที่ 11 เป็นค่าแรงดันเอาต์พุตในขณะที่ยังไม่จ่ายกระแสให้โหลด และจ่ายจ่ายกระแสให้กับโหลดแล้วแรงดันจะลดลงเล็กน้อยตามที่แสดงในรูปที่ 14
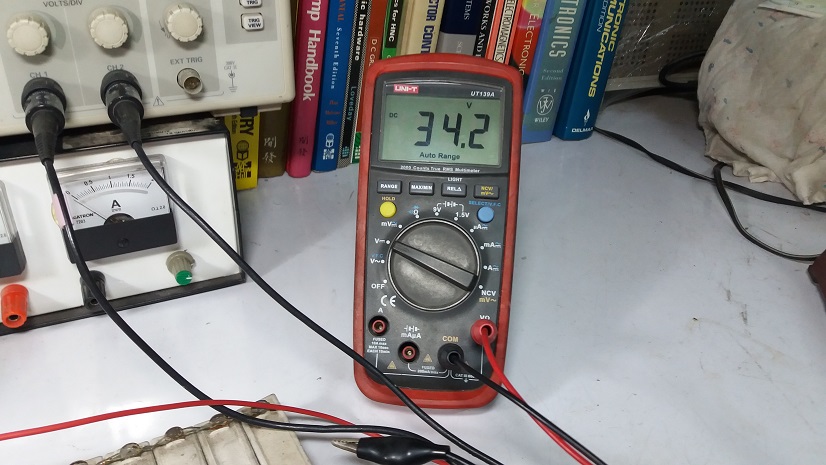

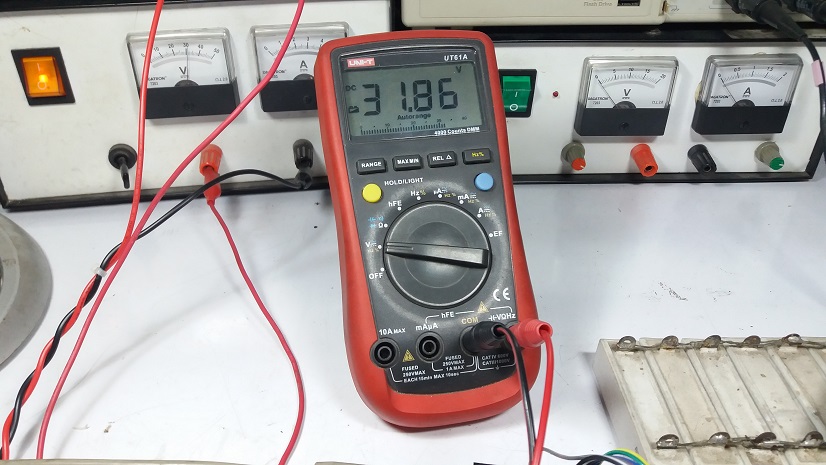
ในรูปที่ 15 ถึงรูปที่ 19 เป็นการทดลองที่ 2 โดยการปรับค่า PWM = 60% ในช่วงนี้แรงดันเอาต์พุตจะมีค่าเพิ่มขึ้น เมื่อเทียบกับการทดลองที่ 1 ซึ่งจะมีค่าประมาณ 34V แต่เมื่อให้บอร์ดจ่ายกระแสให้กับโหลดที่ประมาณ 6A แรงดันที่เอาต์พุลจะลอดลงเช่นกันดังแสดงในรูปที่ 19
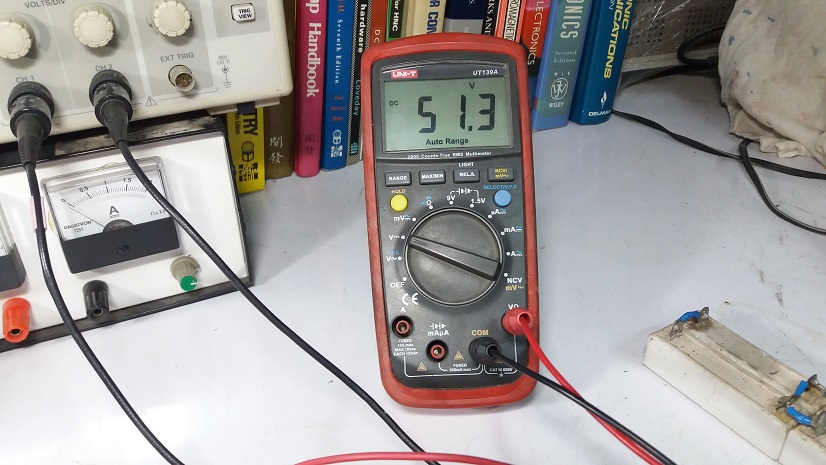

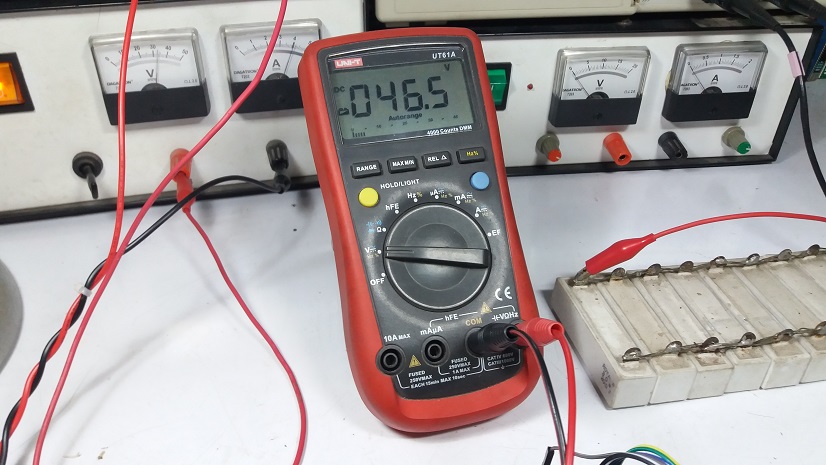
ในรูปที่ 20 ถึงรูปที่ 24 เช่นเดียวกับการทดลองที่ 1 และ 2 แต่การทดลองทั้ง 3 ครั้งนี้ เพื่อเป็นการทดลองการปรับเปลี่ยนขนาดสัญญาณพัลซ์วิดธ์มอดูเลตชั่น (PWM Signal) ที่จะเป็นสัดส่วนกับค่าแรงดันเอาต์พุตที่เกิดขึ้น ทั้งนี้เพื่อให้เราสามารถพัฒนาโปรแกรมควบคุมแรงดันได้อย่างถูกต้อง และอยู่ในช่วงการควบคุมแรงดันที่เหมาะสมสำหรับการควบคุมระบบปิด (Closed loop control system)
สำหรับโครงงานนี้เป็นบอร์ดต้นแบบสำหรับวงจรซิงโครนัสบักคอนเวอร์เตอร์ ที่สามารถรับแรงดันอินพุตได้ประมาณ 55VDC และกำหนดค่าแรงดันเอาต์พุตไว้ที่ประมาณ 24V/5A เพื่อใช้ในการชาร์จแบตเตอรี่ในระบบแบบ 24V และสามารเชื่อมต่อกับบอร์ดไมโครคอนโทรลเลอร์ต่างๆ ตามที่ต้องการ ทั้งนี้จากการทดลองวงจรที่ผ่านมาบอร์ดสามารถใช้งานได้เป็นปกติ ซึ่งในส่วนนี้ยังคงเป็นการทดลองบอร์ดต้นแบบ (Hardware) และในส่วนของการควบคุมแรงดันเอาต์พุตในการชาร์จแบตเตอรี่ (Stage of Change: SOC) จะต้องเขียนโปรแกรมควบคุมการทำงานเพิ่มเติม (Software) เพื่อให้สามารถชาร์จได้อย่างเหมาะสม และสามารถเลือกตำแหน่งการให้พลังงานสูงสุดจากแผงโซล่าร์เซลล์ ณ ช่วงเวลาต่างๆ เพิ่มขึ้นกันต่อครับ.
Reference
- https://www.infineon.com/dgdl/Infineon-IR2153-DataSheet-v01_00-EN.pdf?fileId=5546d462533600a4015355c8c5fc16af
- https://pdf1.alldatasheet.com/datasheet-pdf/view/68074/IRF/IR2153.html
- https://www.ti.com/lit/ug/slvu001a/slvu001a.pdf?ts=1628607070712&ref_url=https%253A%252F%252Fwww.google.com%252F
- https://www.onsemi.com/pdf/datasheet/ncp3101-d.pdf
- https://www.onsemi.com/pdf/datasheet/ncp6354-d.pdf
- https://www.infineon.com/dgdl/Infineon-AP32319_Synchronous_Buck_converter_with_XMC_Digital_Power_Explorer_Kit-AN-v01_00-EN.pdf?fileId=5546d462557e6e8901559b9168515eec
- https://www.ixys.com/Documents/AppNotes/IXAN0069.pdf
- https://cdn.sos.sk/productdata/c0/aa/e64040b2/ltc3115edhd-1-pbf.pdf