BLDC Motor Speed Control By Intelligent Power Module : IPM
สำหรับโครงงาน BLDC Motor Speed Control By Intelligent Power Module นี้เป็นอีกแบบหนึ่งจากที่เคยออกแบบมาแล้วในส่วนของตัวขับกำลัง เช่น มอสเฟตและไอจีบีที ทั้งนี้เพื่อให้เราเลือกใช้งานได้อย่างเหมาะสม ในการนำมาใช้งาน โดยในโครงงานนี้จะเป็นการนำ Intelligent Power Module : IPM มาใช้ซึ่งจะเป็นอีกแบบหนึ่งของการขับ BLDC Motor เพื่อต้องการให้เราสามารถประหยัดงบประมาณในการออกแบบวงจรขับมอเตอร์ได้เพิ่มขึ้นและประกอบวงจรได้ง่าย.
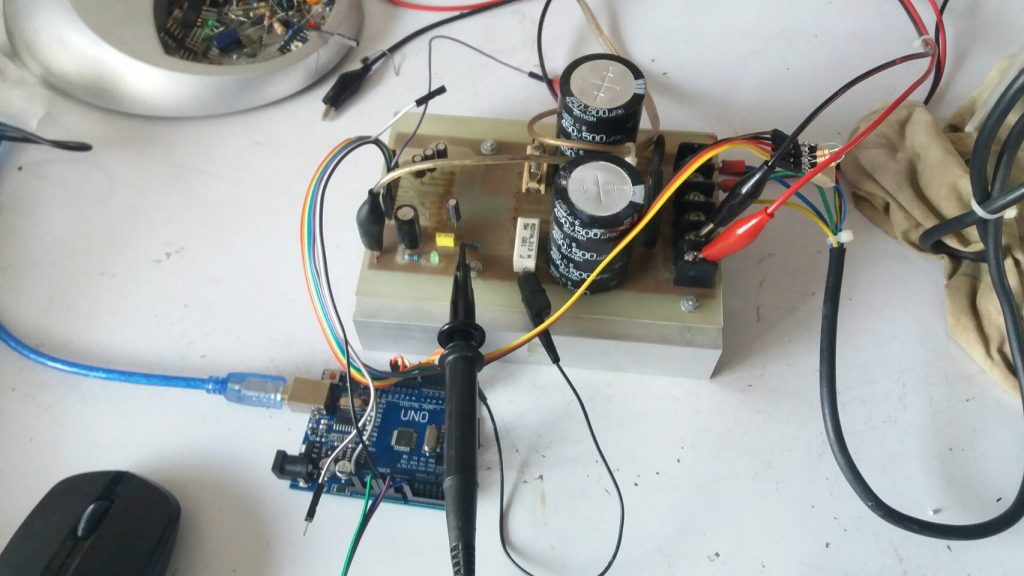
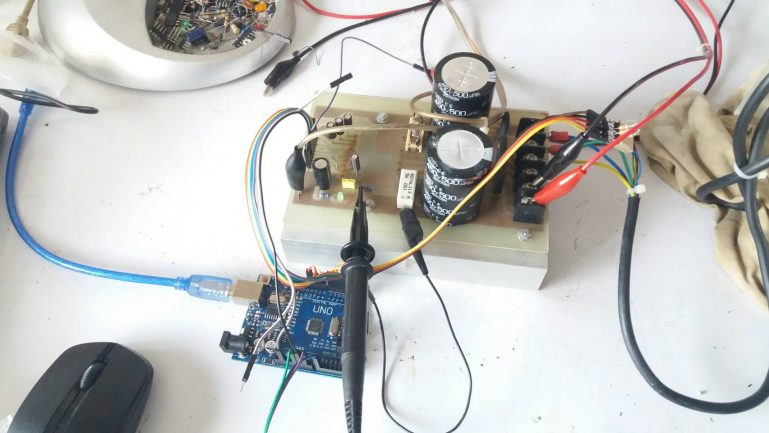
จากในรูปจะเป็นการนำ Intelligent Power Module มาออกแบบให้อยู่ร่วมกับแผ่นวงจรพิมพ์ (PCB) แล้วยึดอยู่บนแผ่นระบายความร้อน (Heat sink) ชิ้นเดียวและใช้คอนเน็กเตอร์เพื่อเป็นจุดต่อสำหรับไฟเลี้ยงให้กับโมดูล จุดต่อกับตัวมอเตอร์และจุดต่อสำหรับตัวประมวลผล โดยในส่วนของการควบคุมกระแสให้กับมอเตอร์จะมีอยู่แล้วภายในตัวเพาเวอร์โมดูล Intelligent Power Module
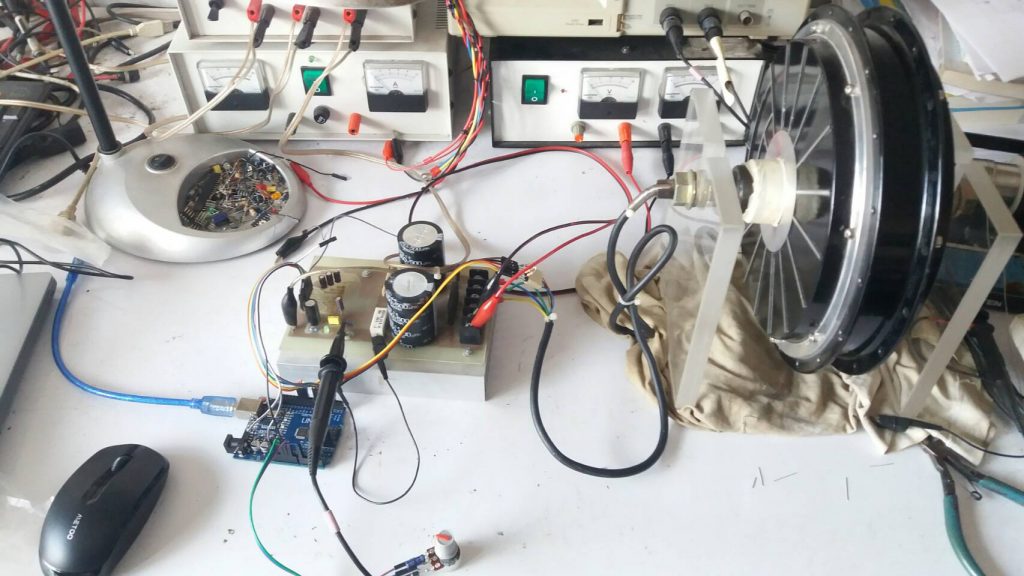
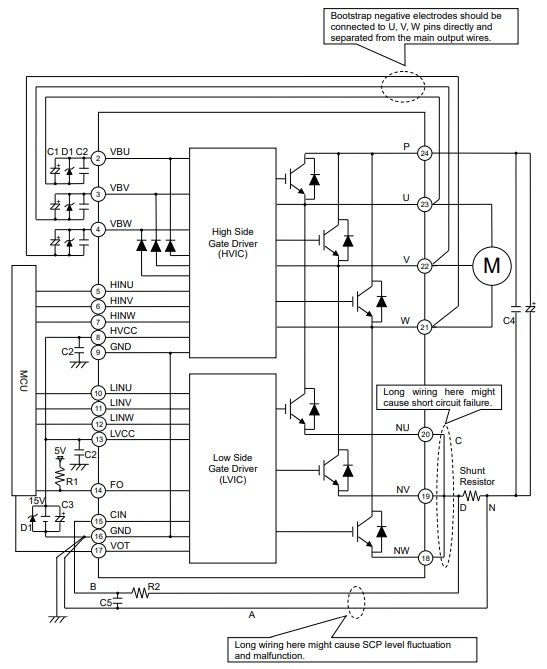
การทดสอบการทำงานจะทดลองใช้กับมอเตอร์แบบไร้แปรงถ่าน (Brushless DC Motor) ขนาด 350W ที่แรงดัน 24V โดยโมดูล Intelligent Power Module จะรับไฟเลี้ยง 2 ชุดคือชุดแรกสำหรับจ่ายให้กับตัวมอเตอร์ (ประมาณ 24V) และชุดที่สองสำหรับจ่ายให้กับชุดขับขาเกตภายในโมดูล (ประมาณ 12-18V) อีกส่วนหนึ่งจะรับสัญญาณ PWM รวม 6 ช่อง เพื่อสร้างสัญญาณอินเวอร์เตอร์ให้กับตัวมอเตอร์
สัญญาณที่ใช้ในการควบคุมการหมุนของตัวมอเตอร์จะมีด้วยกัน 2 ส่วนคือ สัญญาณที่ได้จากตัวมอเตอร์จากการหมุน (Hall-sensor signals) และสัญญาณคำสั่งในการให้มอเตอร์หมุนจากตัวต้านทานปรับค่า (Variable Resistor : VR) โดยสัญญาณจากทั้ง 2 ส่วนนี้จะต่อเข้ากับตัวประมวลผล Arduino UNO
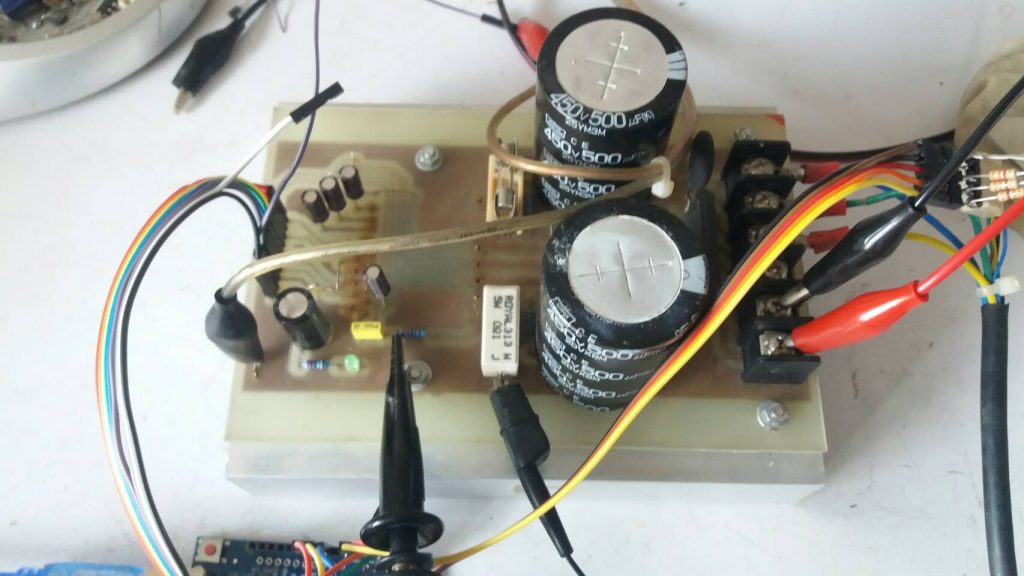
ในส่วนของการควบคุมกระแสให้กับตัวมอเตอร์นั้น ในวงจรนี้จะใช้ต้วต้านทานค่าต่ำๆ (ในวงจรนี้ใช้ค่า 0.1 โอห์ม) และมีส่วนของการกรองความถี่ให้กับสัญญาณตรวจจับกระแสอีกเล็กน้อยด้วยตัวต้านทานและตัวเก็บประจุในลักษณะของ RC ฟิลเตอร์ สำหรับขาตรวจจับให้กับโมดูลนี้
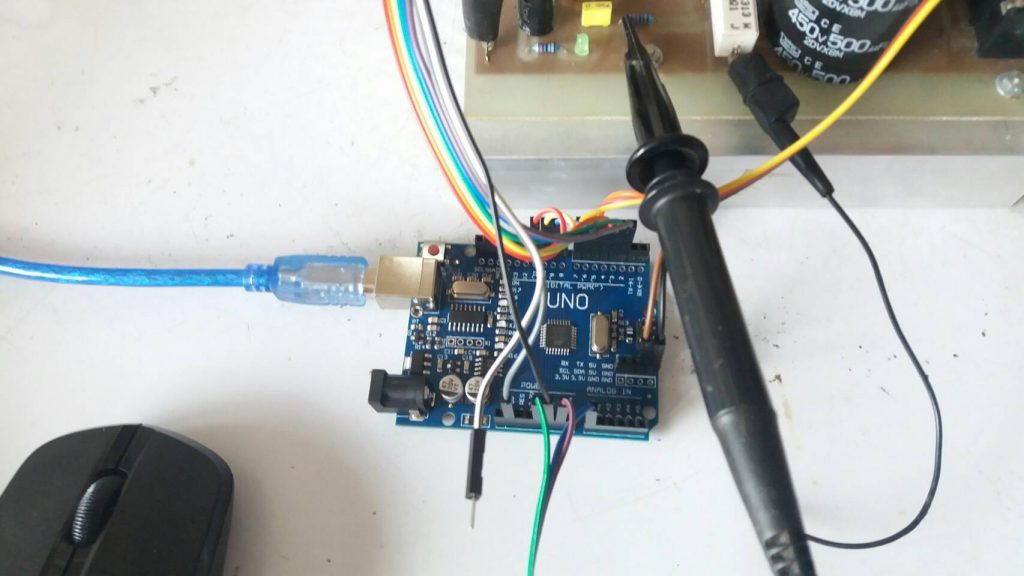
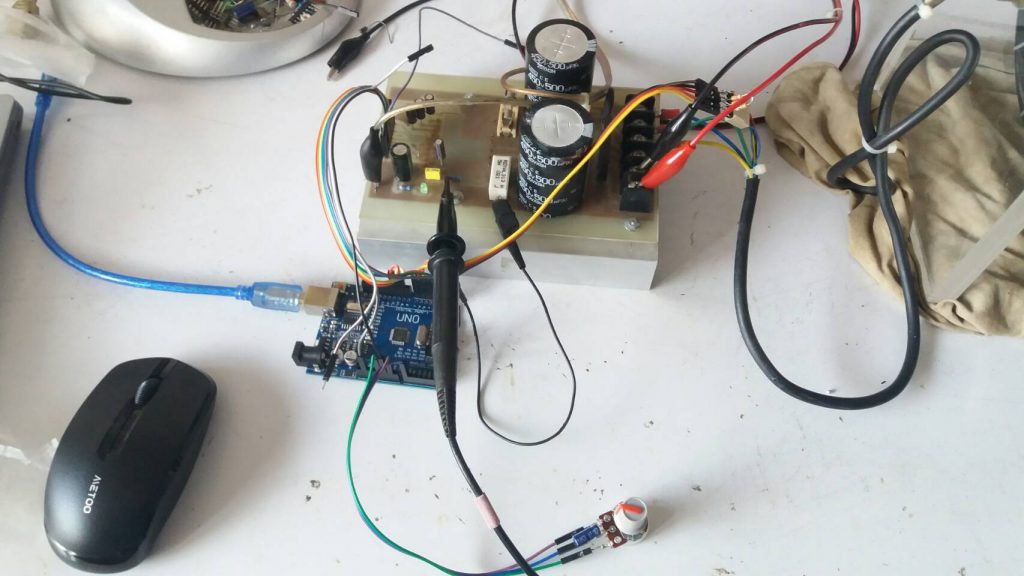
ในส่วนของรูปสุดท้ายจะเป็นบอร์ดประมวลผลที่ใช้บอร์ด Arduino UNO ซึ่งเป็นที่รู้จักกันโดยทั่วไปของนักออกแบบและทดลองทางด้านอิเล็กทรอนิกส์ โดยการทำงานของตัวประมวลผลนี้จะทำหน้าที่รับคำสั่งควบคุมความเร็วจากผู้ใช้ผ่านตัวต้านทานปรับค่า จากนั้นก็จะรับสัญญาณควบคุมตำแหน่งที่เกิดขึ้นจากตัวมอเตอร์ (เป็นลักษณะของสัญญาณพัลซ์ 3 เฟส) เพื่อนำมาประมวลผลและสร้างสัญญาณอินเวอร์เตอร์ 3 เฟส สำหรับขับตัวมอเตอร์ให้ได้ความเร็วตามที่ผู้ใช้กำหนด
Reference