SRM400 Sonar Ranging Module Controlled by Arduino UNO
สำหรับโครงงานนี้เราจะมาทดลองใช้โมดูล SRM400 ตรวจจับวัตถุหรือการวัดระยะทางอีกแบบหนึ่ง ซึ่งปกติเราจะเห็นโมดูลอัลตร้าโซนิกส์ HC-SR04 และ HC-SR05 กันบ้างแล้ว โดยตัวโมดูล SRM400 นี้จะต่างจากโมดูลอัลตร้าโซนิกส์จากที่กล่าวคือ จะใช้ตัวรับและส่งสัญญาณโซน่าในตัวเดียวกัน และที่ตัวบอร์ดจะมีจุดเชื่อมต่อกับบอร์ดควบคุมไมโครคอนโทรลเลอร์เพียง 1 ขาเช่นกัน แต่จะอาศัยปรับช่วงเวลาการส่งสัญญาณและรับสัญญาณเหลื่อมเวลาทำงาน ซึ่งจะเป็นเทคนิคนึ่งที่น่าสนใจและนำโมดูล SRM400 ไปประยุกต์ใช้งานในด้านต่างๆ ต่อไป
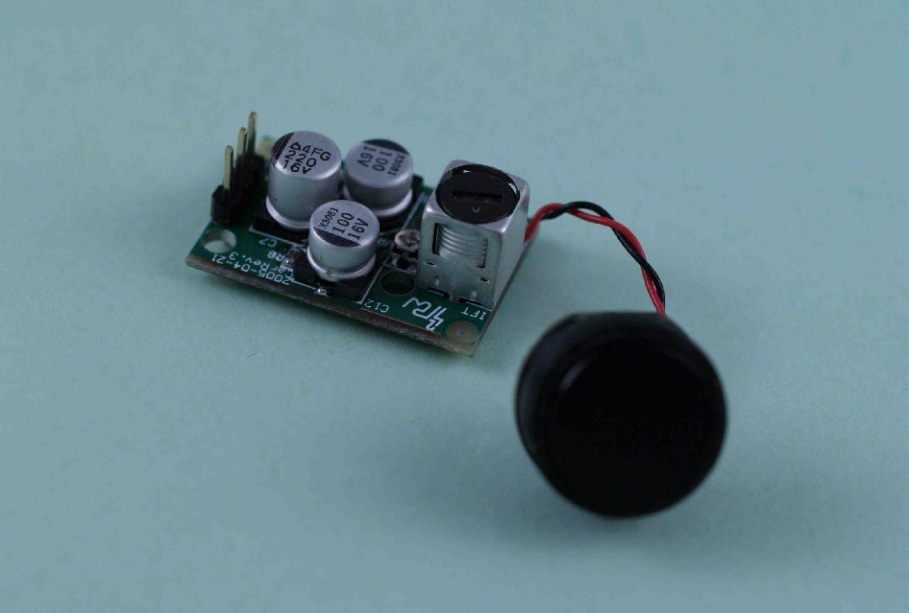
รูปที่ 1 ลักษณะของตัวโมดูล SRM400 ซึ่งจะมีขนาดค่อนข้างเล็ก ประมาณ 2X3.5 เซนติเมตร และตัวเซนเซอร์โซน่าจะมีเส้นผ่าศูนย์กลางปนะมาณ 1.5 เซนติเมตร จุดเชื่อต่อกับบอร์ดควบคุมจะมี 3 ขาคือ +5V, GND และขา I/P ที่ขาเดียวกัน
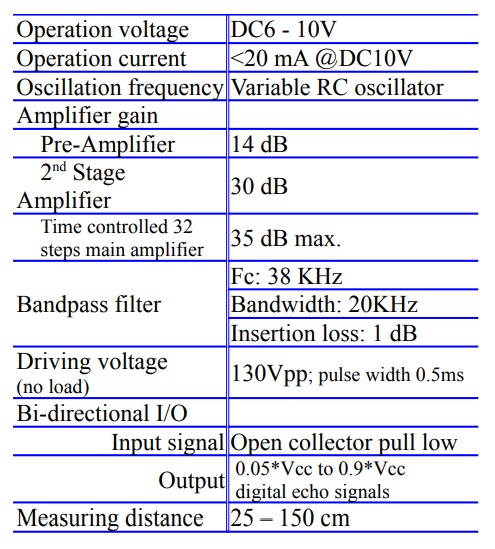
รูปที่ 2 แสดงสเปกการทำงานของโมดูล SRM400 ที่สำคัญ ซึ่งจะช่วยให้เราเข้าใจการทำงานของโมดูลพอสังเขป ช่วยให้เราประเมินการนำโมดูลใปใช้งานในด้านต่างๆ เพิ่มขึ้น โดยรายละเอียดทั้งหมดสามารถเข้าไปตามลิ้งก์อ้างอิงใต้รูปได้ครับ
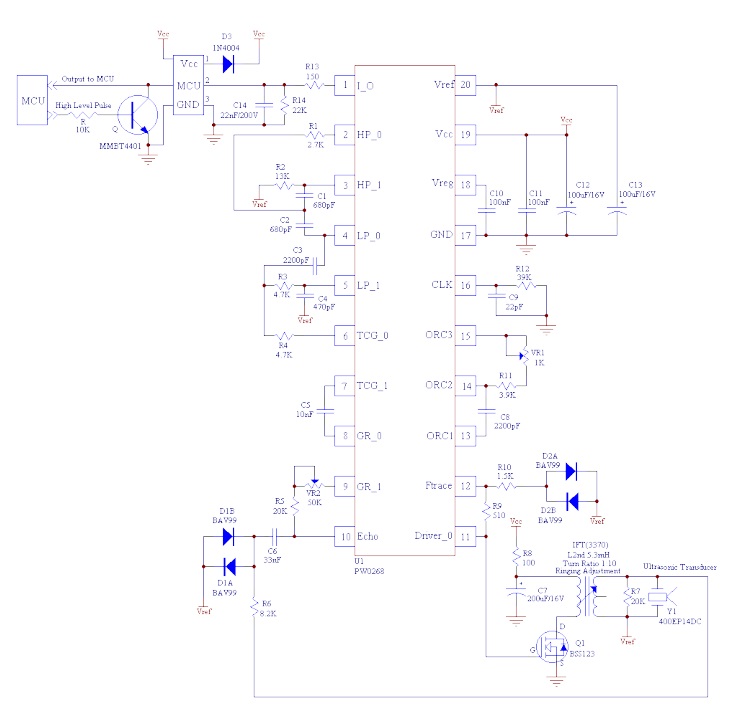
รูปที่ 3 แสดงลักษณะของการต่อใช้งานและวงจรภายในโมดูล SRM400 ช่วยให้เราเข้าใจวงจรการทำงานเพิ่มขึ้น เช่นการกำหนดความถี่ของสัญญาณพาหะ การสร้างสัญญาณขับให้กับโซน่าโมดูลเอาต์พุต และการปรับความไวในการรับสัญญาณเป็นต้น นอกจากนี้ที่ตำแหน่งขาอินพุตและเอาต์พุต (ขา 1) จะมีตัวอย่างการต่อทรานซิสเตอร์เข้ากับโมดูล SRM400 ให้ทราบเพิ่มเติม
***โค้ดโปรแกรมการทดลองอ้างอิงจาก : https://howtomechatronics.com/tutorials/arduino/ultrasonic-sensor-hc-sr04/ [6]
/*
SRM400 Sonar Ranging Module
MCU : Arduino UNO
Date : 15/6/2021
*/
// Defines pins numbers for SRM400
const int trigPin = 9; // PIN High Level Pulse
const int echoPin = 10; // PIN Out put to MCU
// defines variables
long duration;
int distance;
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600); // Starts the serial communication
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(1); // 2
digitalWrite(trigPin, HIGH);
delayMicroseconds(150); // 10 // 150 // 130
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
//distance= duration*0.034/2;
//distance= duration0.047/2; // 5-4-63
distance= duration0.034/2; // 5-4-63
Serial.print(" Distance: ");
Serial.println(distance+26);
//delayMicroseconds(150);
// Note V power supply 7.5-8.5V
}
สำหรับโปรแกรมที่ใช้ในการทดลองนั้น จะเป็นลักษณะเดียวกับใช้ในโมดูลอัลตร้าโซนิกส์ทั่วไป ซึ่งจากตัวโปรแกรมนี้จะใช้สมการคำนวณค่าความเร็วเสียงเดียวกัน แต่อาจจะต้องปรับชดเชยบ้างเล็กน้อย (ตามคอมเม้นที่แทรกในแต่ละบรรทัด) ทั้งนี้ขึ้นอยู่กับการต่ออุปกรณ์ร่วมภายนอกและคุณสมบัติของตัวเซนเซอร์โซน่าและอัลตร้าโซนิกส์ที่ต่างกัน
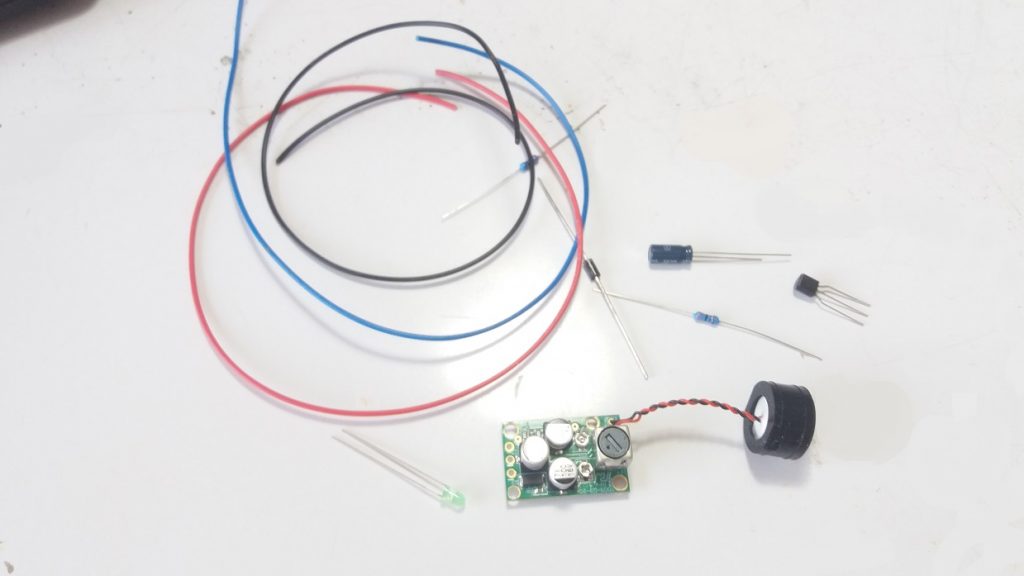
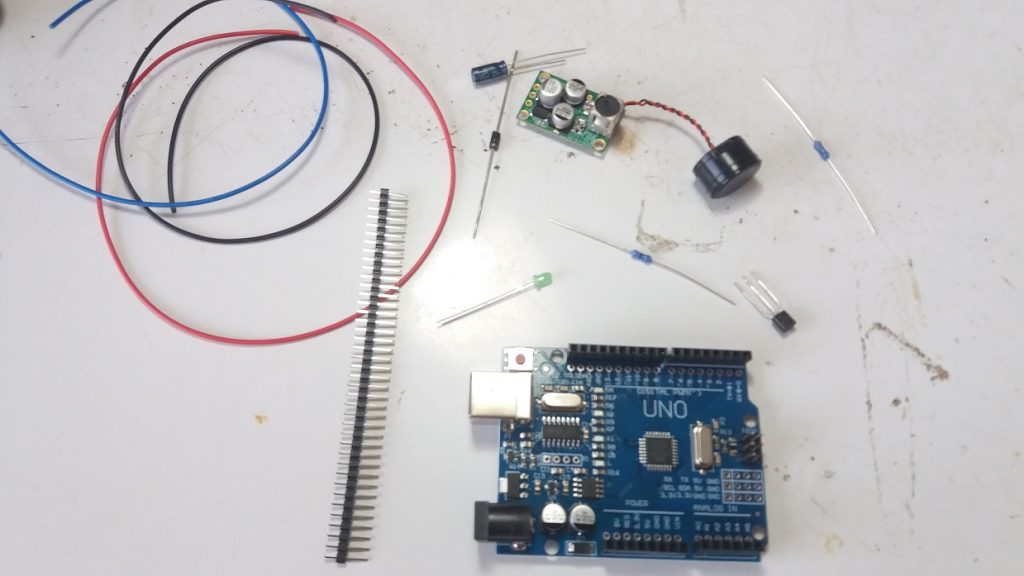
รูปที่ 4 และ 5 เป็นการเตรียมอุปกรณ์ที่ใช้ประกอบเพิ่มเติมกับโมดูล SRM400 แสดงในรูปที่ 4 และในรูปที่ 5 จะเป็นบอร์ดควบคุม Arduino UNO สำหรับเชื่อมต่อกับโมดูล SRM400 เพื่อสร้างสัญญาณทริก (Trig) รับสัญญาณสะท้อนกลับ (echo) รวมทั้งการแสดงผลที่ได้ให้เราทราบ
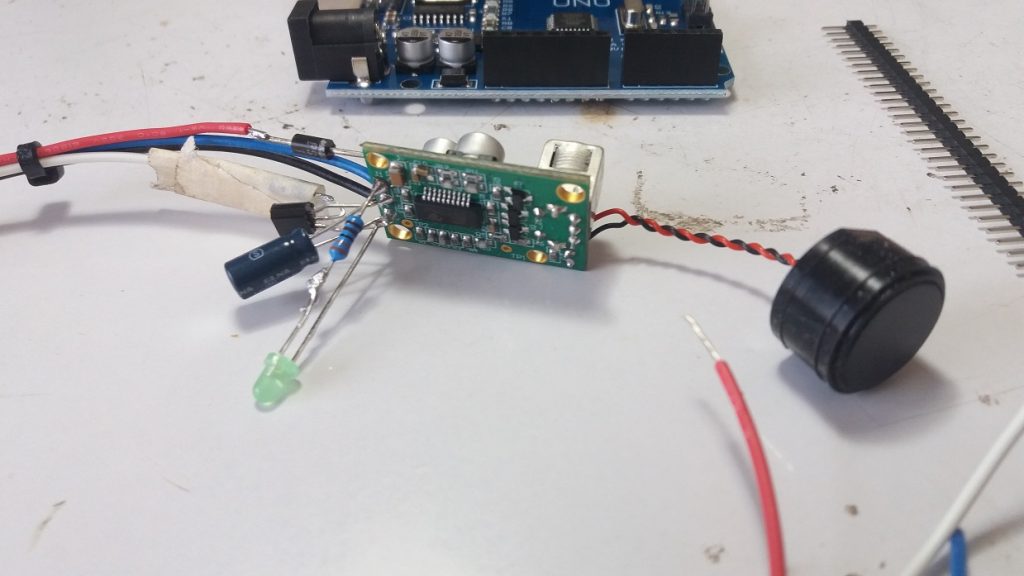
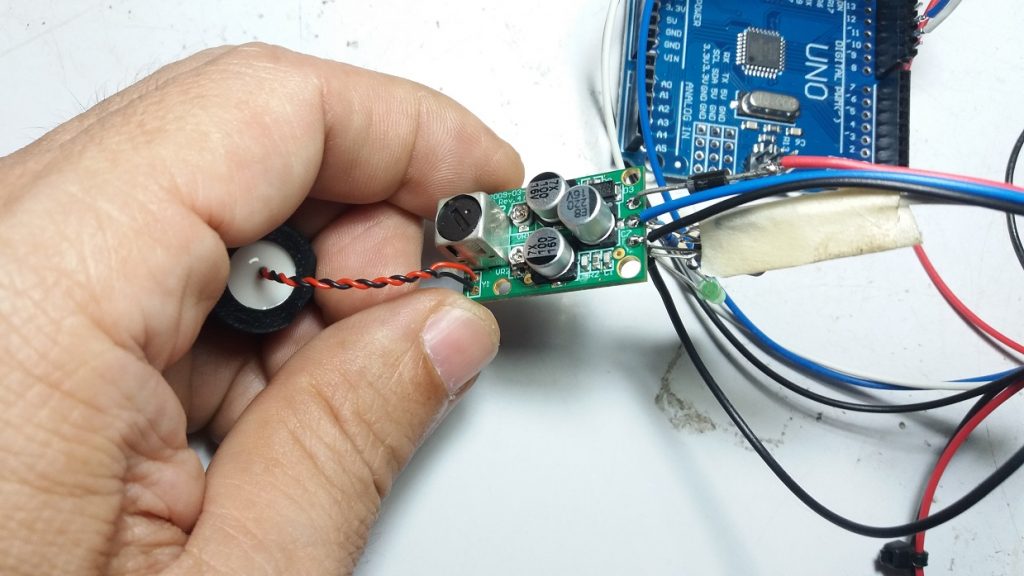
รูปที่ 6 การประกอบอุปกรณ์ต่างๆ เข้ากับโมดูล SRM400 ซึ่งจะมีทรานซิสเตอร์, แอลอีดีแสดงผล และตัวเก็บประจะเพิ่มเติมโดยในการทดลองนี้จะบัดกรียึดเข้ากับตัวโมดูล SRM400 สำหรับวงจรต้นแบบ
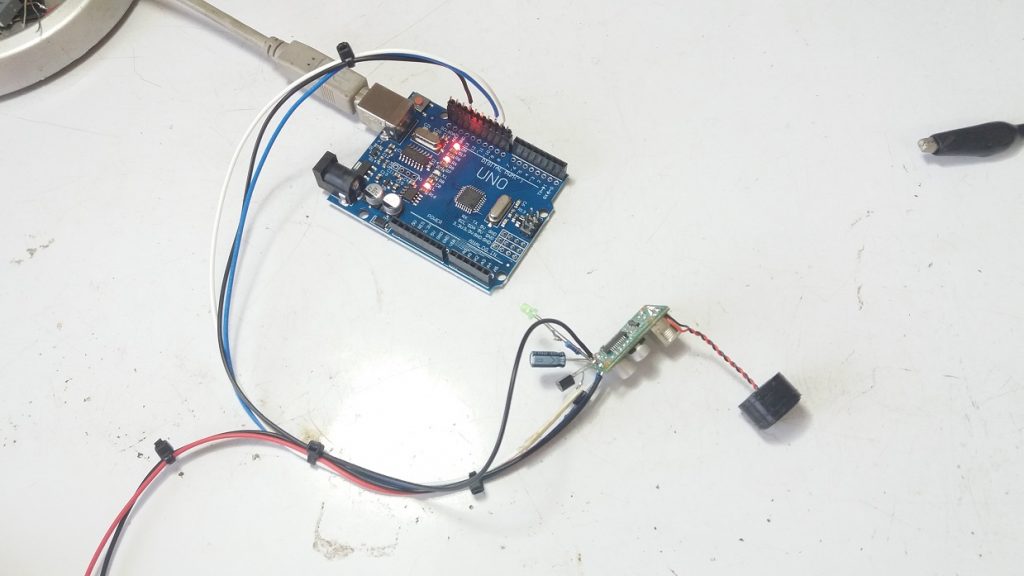
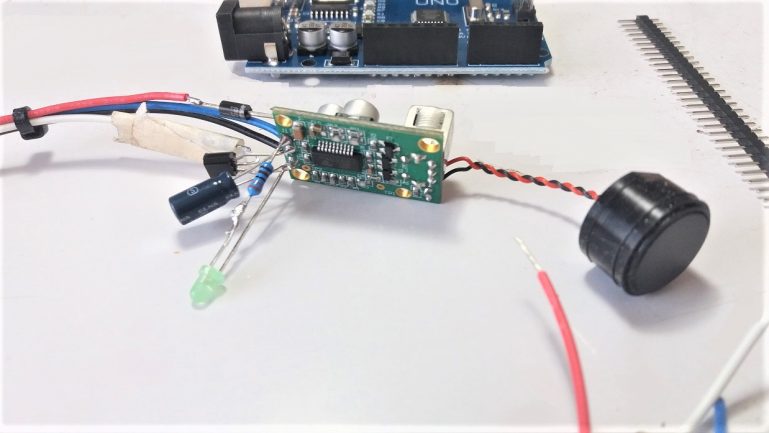
รูปที่ 7 เป็นลักษณะของการต่อร่วมกันระหว่างบอร์ด Arduino UNO เข้ากับโมดูล SRM400 โดยมี่ขา D10 ของบอร์ด Arduino UNO รับสัญญาณสะท้อนกลับ (echo) และที่ขา D9 จะทำหน้าที่กำหนดการส่งสัญญาณโซน่า (Trig) ออกไปนั้นเอง
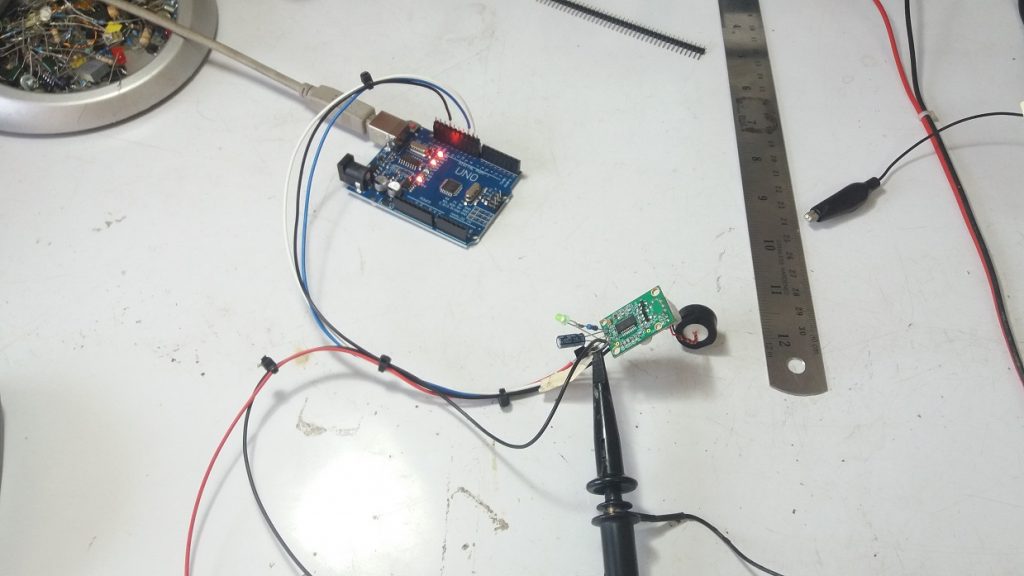
รูปที่ 8 แสดงการทดลองและการทดสอบการทำงานของวงจรทั้งหมด โดยค่าที่วัดได้เทียบกับไม้บรรทัดและวัดลักษณะของสัญญาณที่เกิดขึ้นจากการรับและส่งไปยังบอร์ดควบคุม Arduino UNO
รูปที่ 9 แสดงตำแหน่งการต่อสายไฟของโมดูล SRM400 ที่คอนเน็กเตอร์ และอุปกรณ์ต่างๆ เพื่อให้วงจรทั้งหมดสามารถใช้งานได้ และเป็นต้นแบบสำหรับนำไปพัฒนาต่อไป
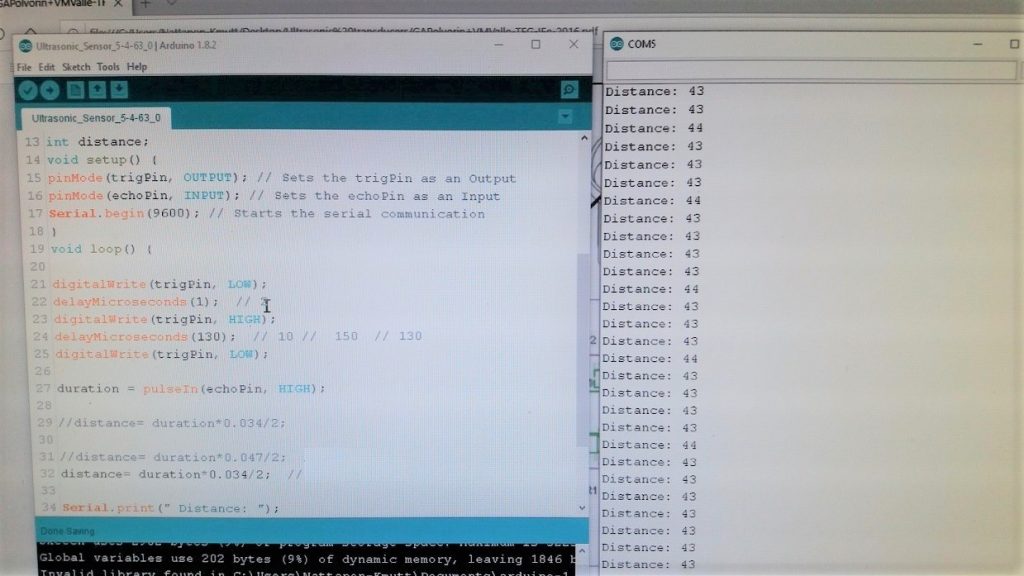
รูปที่ 10 แสดงผลการทดลองที่ได้จากการวัดระยะของวัตถุ โดยให้แสดงผลที่ PortCOM จากโปรแกรม Arduino IDE ซึ่งจากผลที่ได้จะมีค่าใกล้เคียงกับค่าไที่ด้เทียบกับไม้บรรทัด แต่จะตัองปรับชดเชยค่าตัวแปรความเร็วของเสียงบ้างเล็กน้อยก็สามารถนำมาใช้งานได้
สำหรับโครงงานนี้เป็นการตรวจจับวัตถุหรือการวัดระยะทางอีกแบบหนึ่ง ซึ่งปกติเราจะเห็นเป็นโมดูลอัลตร้าโซนิกส์ทั่วไป เช่น โมดูล HC-SR04, HC-SR05, US-100 และ US-016 ซึ่งจะมีขา Trig PIN และ Echo PIN มาให้ใช้งานแล้ว แต่โมดูล SRM400 จะมีขาอินพุตและเอาต์พุตที่จุดเดียวกัน ซึ่งเราจะต้องต่ออุปกรณ์เพิ่มขึ้นอีกเล็กน้อยรวมทั้งกาปรับแต่งการทำงาน ถือเป็นการเรียนรู้และได้ประสบการณ์อีกแบบหนึ่งครับ
Reference
- https://www.farnell.com/datasheets/81208.pdf
- https://th.element14.com/prowave/srm400/module-pw-0268-sonar-ranging/dp/1007370
- http://www.pro-wave.com.tw/english/products/sr/srm400.htm
- https://static.rapidonline.com/pdf/35-1830.pdf
- http://www.prowave.com.tw/pdf/SRM400.pdf
- https://howtomechatronics.com/tutorials/arduino/ultrasonic-sensor-hc-sr04/