สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์กันต่อครับ.
Electrical and Electronics Learn Everyday
สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์กันต่อครับ.
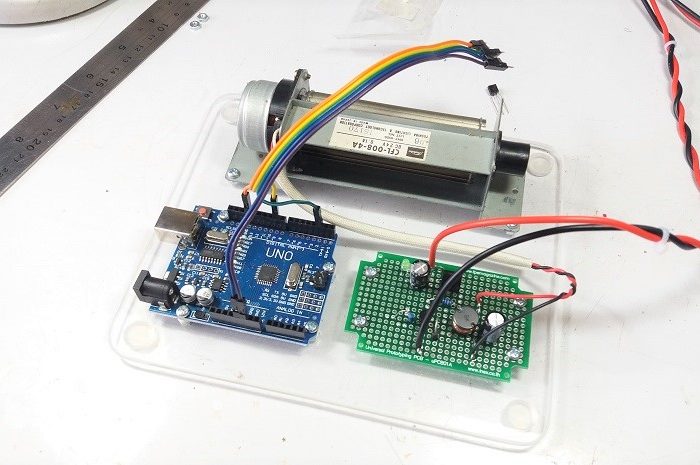
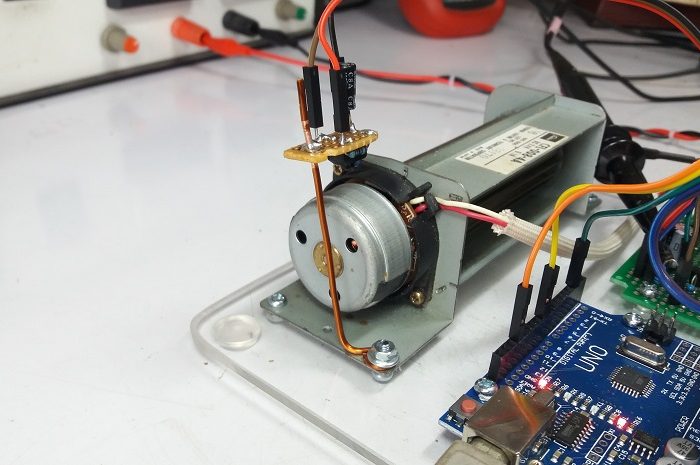
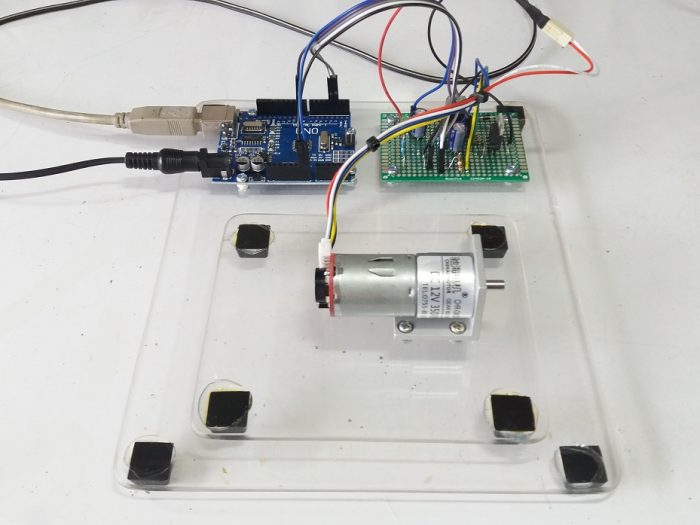
โครงงานนี้เป็นการสร้างชุดฝึกควบคุมความเร็วมอเตอร์กระแสตรง (DC Motor) ขนาดเล็ก ร่วมกับบอร์ดขับมอเตอร์ที่ออกแบบเพิ่มและบอร์ดควบคุม Arduino UNO
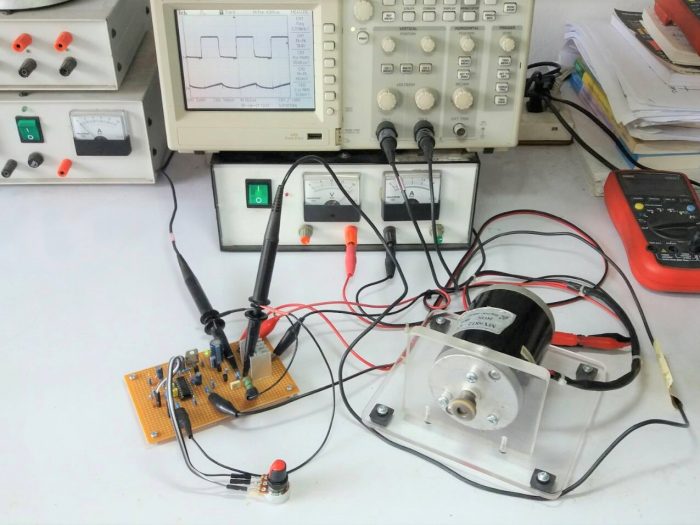
โครงงานนี้เป็นการพัฒนาต่อเนื่อง สำหรับการควบคุมมอเตอร์กระแสตรงด้วยไอซีเบอร์ TL494 ซึ่งในเวอร์ชั่น 2 นี้จะเป็นการปรับปรุงจากเวอร์ชั่น 1 ให้สามารถควบคุมความเร็วรอบแบบปิด ด้วยการรับสัญญาณป้อนกลับจากตัวมอเตอร์ (Process Value : PV) เข้ามาควบคุมด้วยออปแอมป์ และค่ากำหนดความเร็ว (Set Point : SP)
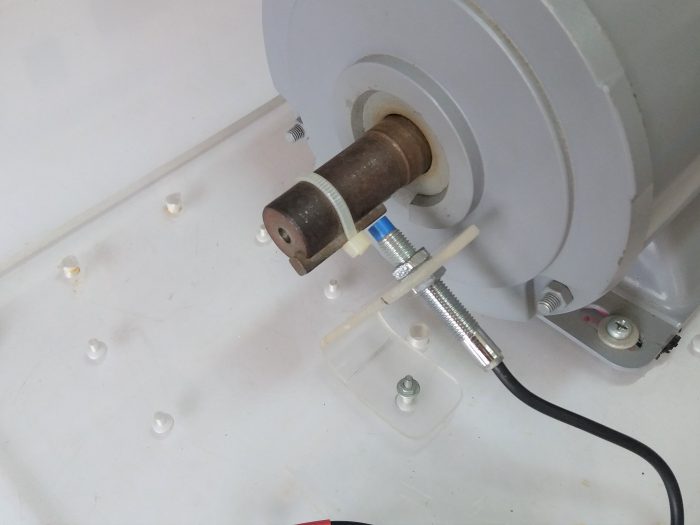
มาติดตั้งพล๊อกซิมิตี้เซนเชนเซอร์ (Proximity Speed sensor) สำหรับใช้ในการตรวจับความเร็วรอบให้กับมอเตอร์ 3 เฟสแบบอินดักชั่น มอเตอร์ (3Phase Induction Motor) แบบง่ายกันครับ
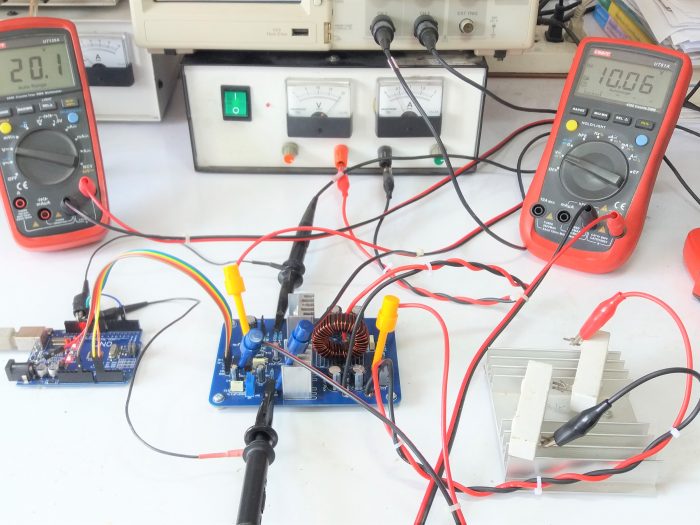
โครงงานนี้เป็นการใช้บอร์ด Arduino UNO ในการควบคุมวงจรซิงโครนัสบักคอนเวอร์เตอร์ (Synchronous Buck Converter) โดยเป็นการทดลองเบื้องต้นแบบหนึ่ง สำหรับเป็นแนวทางในการพัฒนาวงจรให้เหมาะสมกับการนำไปใช้งานในด้านต่างๆ
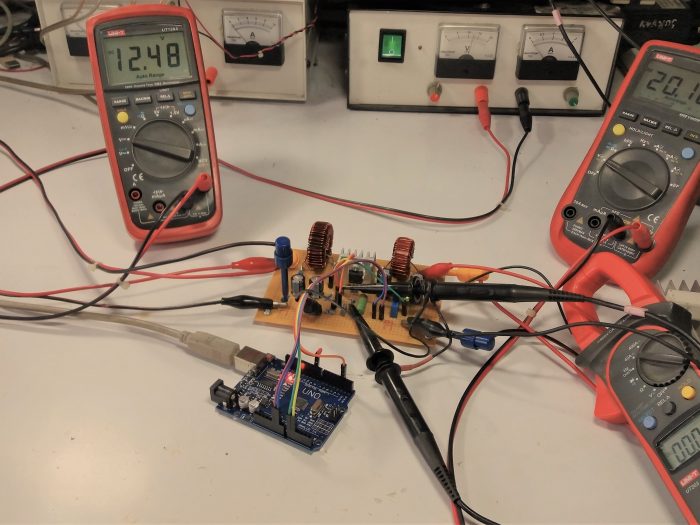
สำหรับก่อนหน้านี้เคยทดลองวงจรบักคอนเวอร์เตอร์ (Buck Converter) ไปบ้างแล้ว วันนี้จะขอนำเสนอ ดีซี ทู ดีซี (DC to DC) แบบบูทคอนเวอร์เตอร์ (Boost Converter) กันบ้างนะครับ โดยในโครงงานนี้จะใช้บอร์ด Arduino UNO เป็นตัวประมวลผลสัญญาณทั้งหมด
การควบคุมความเร็วให้กับมอเตอร์ไฟฟ้ากระแสตรง (DC Motor) ด้วย PID Control และป้อนกลับสัญญาณด้วย Rotary encoder