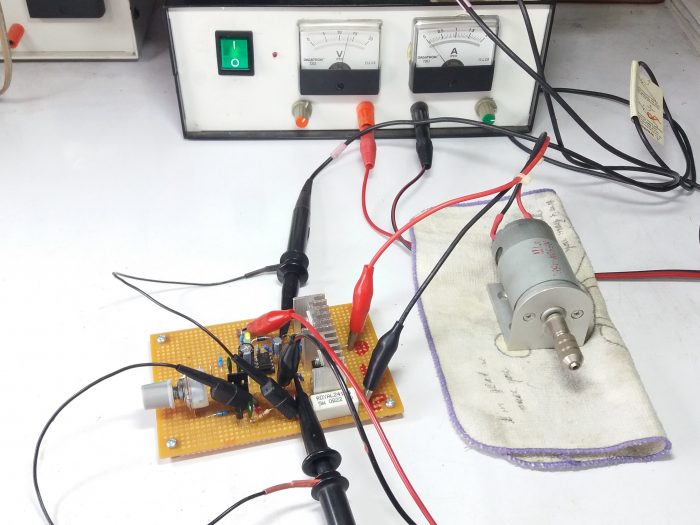
โครงงานนี้เป็นการควบคุมความเร็วมอเตอร์กระแสตรงด้วยไอซี IR2153 แบบ Half-bridge DC motor drives ซึ่งเป็นเทคนิคการขับมอเตอร์กระแสตรงอีกแบบหนึ่งครับ.
Electrical and Electronics Learn Everyday
โครงงานนี้เป็นการควบคุมความเร็วมอเตอร์กระแสตรงด้วยไอซี IR2153 แบบ Half-bridge DC motor drives ซึ่งเป็นเทคนิคการขับมอเตอร์กระแสตรงอีกแบบหนึ่งครับ.
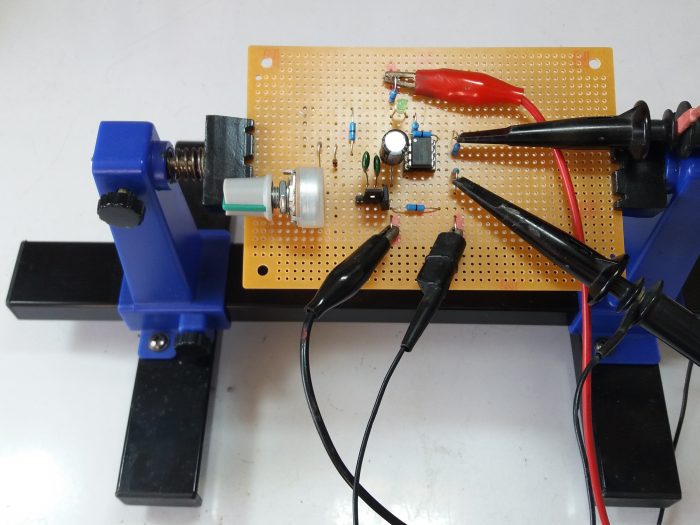
ไอเดียเล็กๆ สำหรับช่วยให้ไอซี IR2153 สามารถปรับความถี่และสัญญาณพัลซ์วิดธ์มอดูเลตชั่นได้ 0-98% ด้วยการเพิ่มอุปกณ์อีกเล็กน้อยจากวงจรปกติทั่วไป ซึ่งในตัวอย่างนี้ทดลองที่ความถี่ 12kHz, 24kHz และ 50kHz
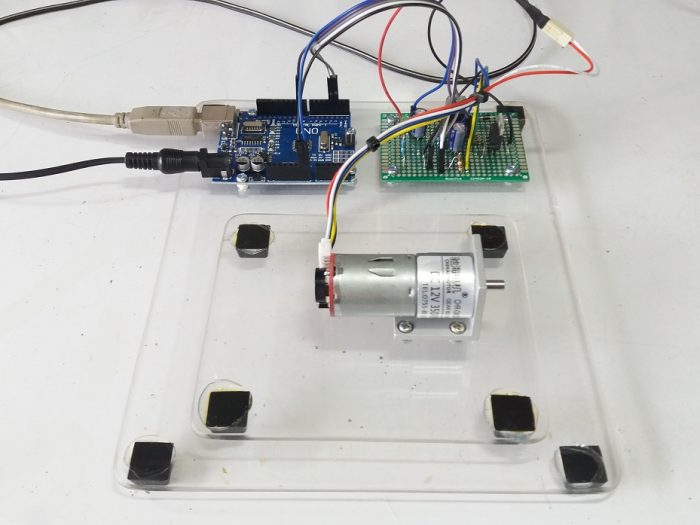
การควบคุมความเร็วให้กับมอเตอร์ไฟฟ้ากระแสตรง (DC Motor) ด้วย PID Control และป้อนกลับสัญญาณด้วย Rotary encoder
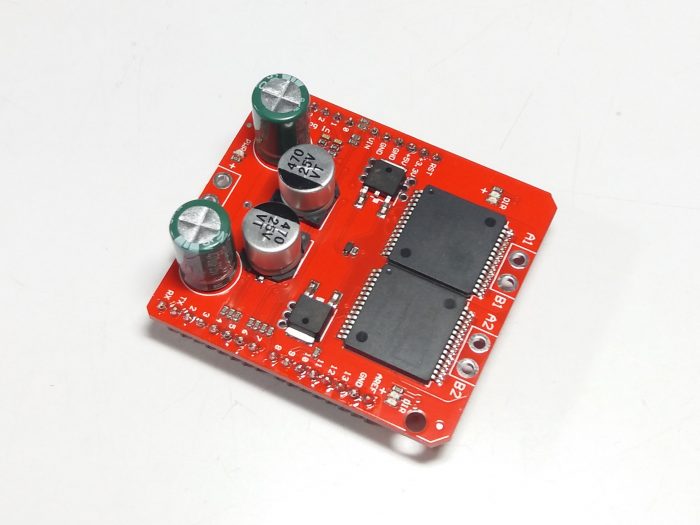
ทดลองต่อใช้งานบอร์ด VNH2SP30 (Monster Moto Shield) ซึ่งเป็นชีลด์บอร์ดสำหรับขับมอเตอร์ที่สามารถรองรับกระแสได้สูงถึง 30A และใช้ร่วมกับบอร์ด Arduino UNO ทันที
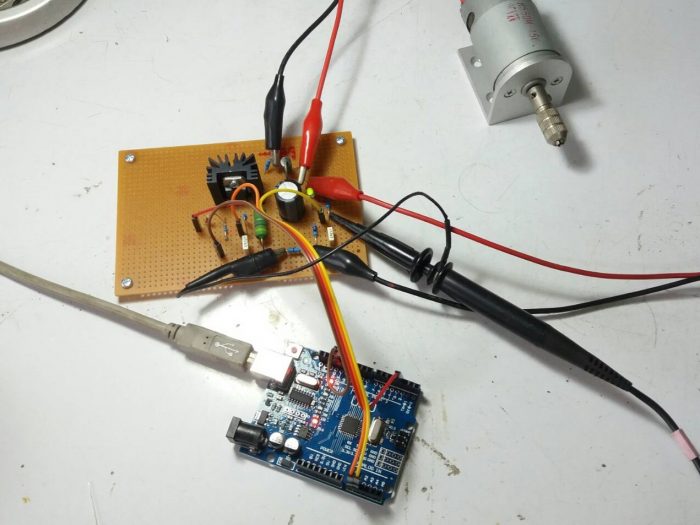
การควบคุมความเร็วมอเตอร์กระแสตรง (DC Motor) โดยใช้สัญญาณค่าแรงดันย้อนกลับ (Back-EMF) ของตัวมอเตอร์ในการป้อนกลับ (Feedback) เพื่อให้เราสามารถควบคุมความเร็วได้คงที่
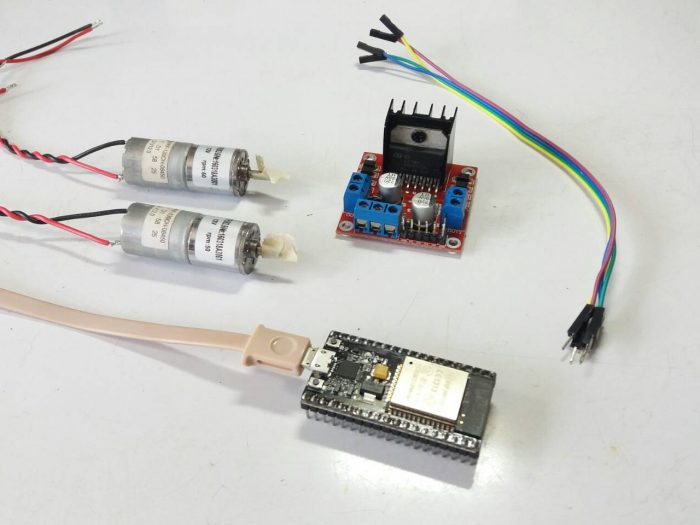
โครงงานนี้จะเป็นการควบคุม DC Motor โดยใช้บอร์ฺด ESP32 Devkit จำนวน 2 ช่อง ซึ่งเป็นการทดลองเบื้องต้น สำหรับการควบคุมระหว่างบอร์ด ESP32 Devkit กับ L298 Module