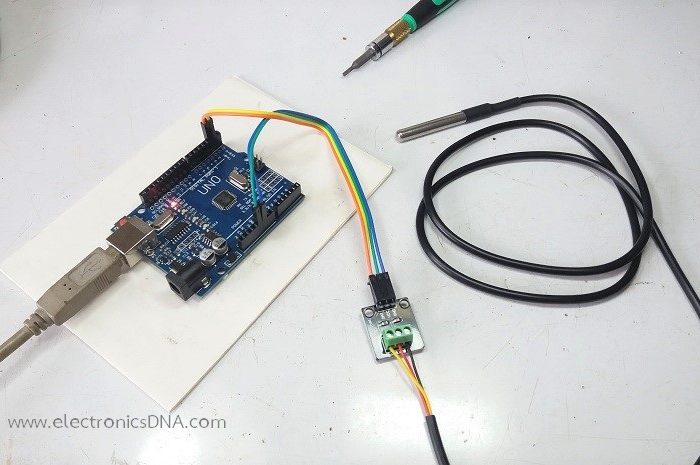
โครงงานเล็กๆ กับการวัดค่าอุณหภูมิทั่วไป โดยใช้ไอซี DS18B20 เพื่อใช้สำหรับตรวจสอบในวงจรคอนเวอร์เตอร์หรือแหล่งจ่ายไฟสวิตชิ่งเพาเวอร์ซัพพลาย.
Electrical and Electronics Learn Everyday
โครงงานเล็กๆ กับการวัดค่าอุณหภูมิทั่วไป โดยใช้ไอซี DS18B20 เพื่อใช้สำหรับตรวจสอบในวงจรคอนเวอร์เตอร์หรือแหล่งจ่ายไฟสวิตชิ่งเพาเวอร์ซัพพลาย.
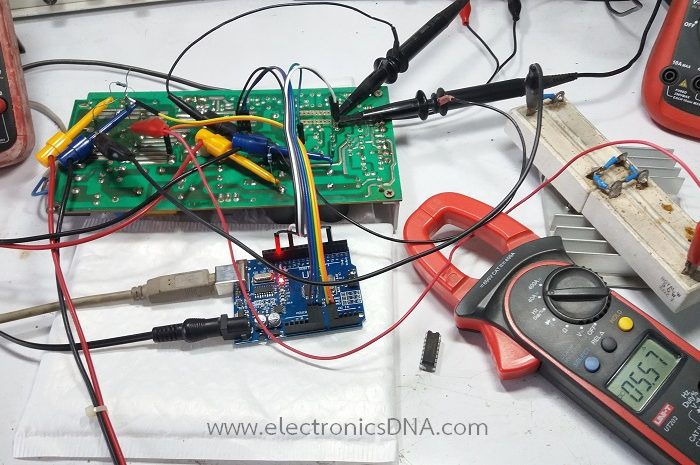
สำหรับโครงงานนี้เป็นทดลองนำบอร์ด Arduino UNO มาควบคุมสวิตชิ่งเพาเวอร์ซัพพลายขนาด 100 วัตต์ แทนไอซีเดิมเบอร์ uPC494C ที่เป็นแบบอะนาลอก
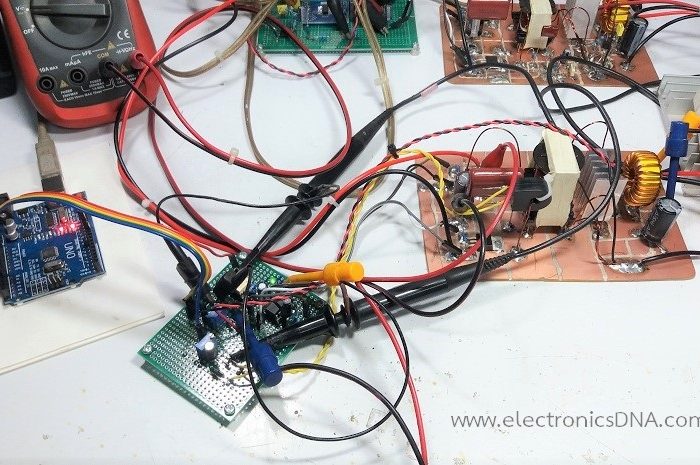
การทดลองเบื้องต้นด้วยการใช้บอร์ด Arduino UNO ควบคุมสวิตชิ่งเพาเวอร์ซัพพลาย ในโหมดเรโซแนนท์ (ZVS) แบบฮาฟบริดจ์ คอนเวอร์เตอร์ ขนาด 45 วัตต์
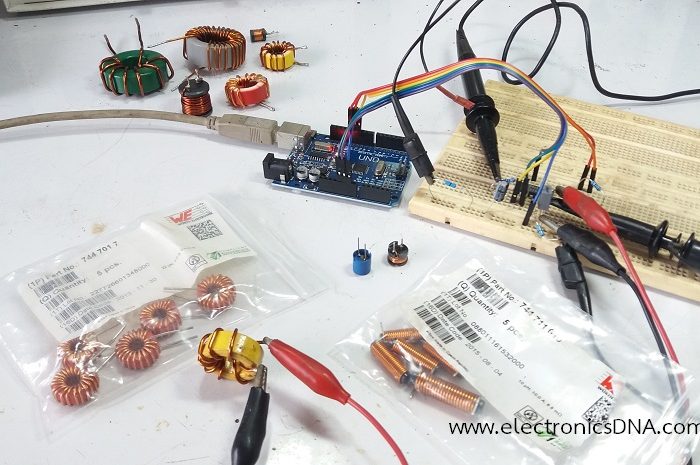
มาสร้างเครื่องมือค่าความเหนี่ยวนำอย่างง่าย ราคาไม่แพง สำหรับการทดลองวงจรสวิตชิ่งโหมดเพาเวอร์ซัพพลายและวงจรคอนเวอร์เตอร์ต่างๆ กันครับ.

โครงงานนี้เป็นการพัฒนาต่อเนื่องจากที่นำเสนอในเวอร์ชั่น 1 ให้เป็นลักษณะของคอนเวอร์เตอร์แบบ Current-fed Push-Pull Parallel Resonant Inverter
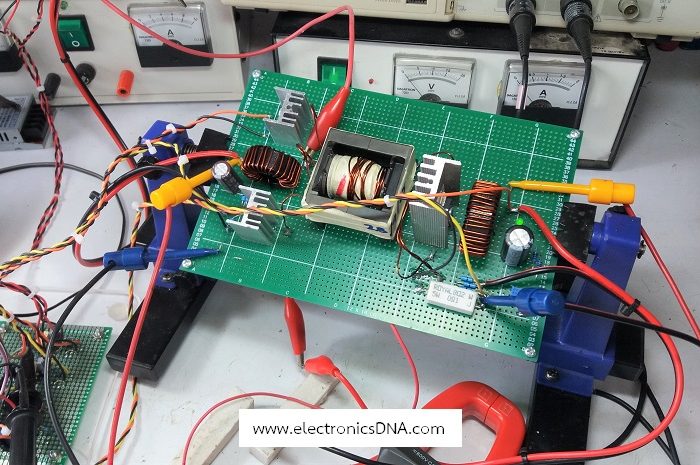
โครงงานสวิตชิ่งวงจรพุช-พูล คอนเวอร์เตอร์ (Push-Pull Converter) ควบคุมด้วยบอร์ด Arduino UNO โดยรับค่าแรงดันอินพุตประมาณ 40VDC จ่ายกำลังทางด้านดเอาค์พุตที่ 12V/2.4A (30W)

การทดลองใช้งานงานโมดูล GY-9833 กับการสร้างสัญญาณในรูปแบบต่างๆ หรือเรียก ฟังก์ชั่นเจนเนอร์เรเตอร์ (Programmable Waveform Generator) เบื้องต้น.