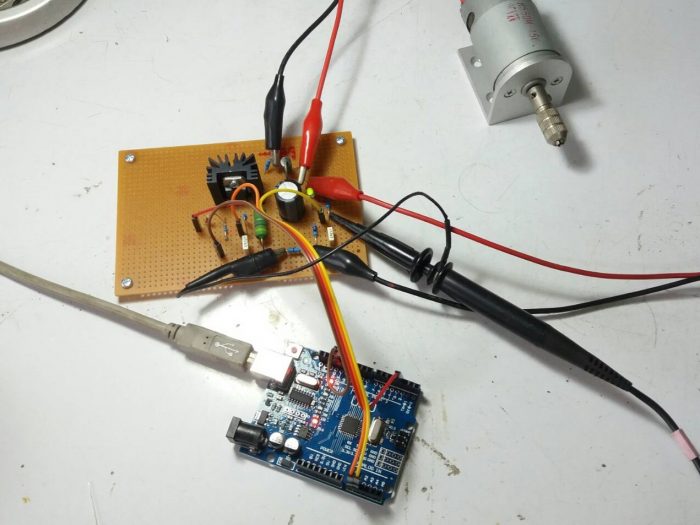
อีกหนึ่งโครงงานกับวงจร ดีซี ทู ดีซี แบบชุก คอนเวอร์เตอร์ (Cuk Converter) โดยใช้บอร์ดควบคุม Arduino UNO ในการประมวลผลกันแบบเบื้องต้น
Electrical and Electronics Learn Everyday
อีกหนึ่งโครงงานกับวงจร ดีซี ทู ดีซี แบบชุก คอนเวอร์เตอร์ (Cuk Converter) โดยใช้บอร์ดควบคุม Arduino UNO ในการประมวลผลกันแบบเบื้องต้น

โครงงานการทดลองคอนเวอร์เตอร์ขนาดเล็กแบบซีต้า ซึ่งเป็นคอนเวอร์เตอร์ที่มีลักษณะของการทำงานที่น่าสนใจและวงจรการทำงานไม่ซับซ้อนมากนักครับ.
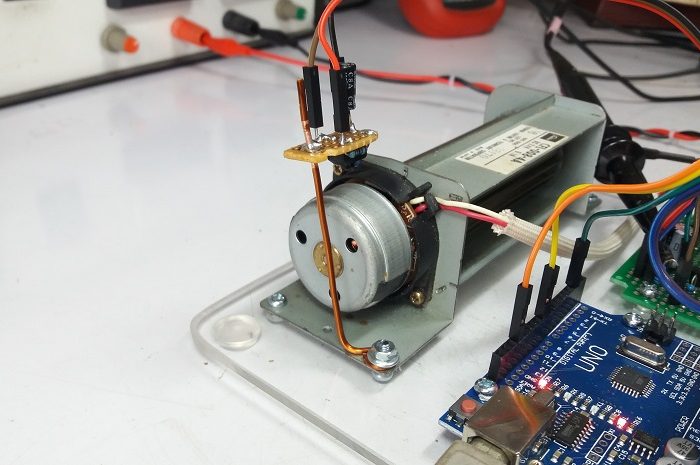
สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์กันต่อครับ.
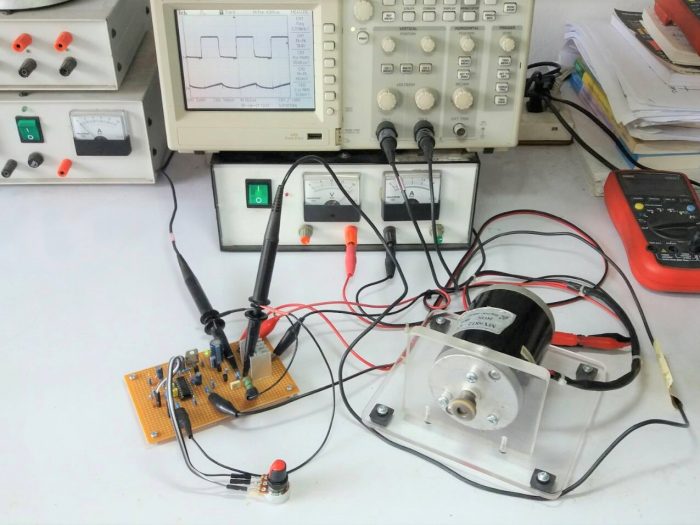
โครงงานนี้เป็นการพัฒนาต่อเนื่อง สำหรับการควบคุมมอเตอร์กระแสตรงด้วยไอซีเบอร์ TL494 ซึ่งในเวอร์ชั่น 2 นี้จะเป็นการปรับปรุงจากเวอร์ชั่น 1 ให้สามารถควบคุมความเร็วรอบแบบปิด ด้วยการรับสัญญาณป้อนกลับจากตัวมอเตอร์ (Process Value : PV) เข้ามาควบคุมด้วยออปแอมป์ และค่ากำหนดความเร็ว (Set Point : SP)
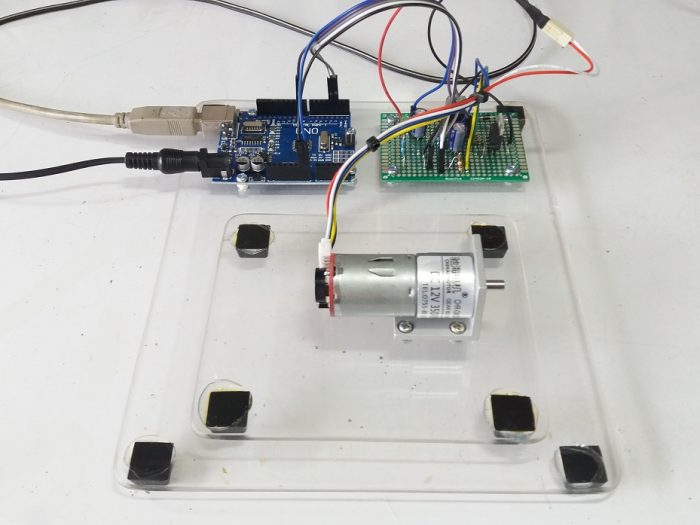
การควบคุมความเร็วให้กับมอเตอร์ไฟฟ้ากระแสตรง (DC Motor) ด้วย PID Control และป้อนกลับสัญญาณด้วย Rotary encoder
การควบคุมความเร็วมอเตอร์กระแสตรง (DC Motor) โดยใช้สัญญาณค่าแรงดันย้อนกลับ (Back-EMF) ของตัวมอเตอร์ในการป้อนกลับ (Feedback) เพื่อให้เราสามารถควบคุมความเร็วได้คงที่