Simple Linear Actuator Control by Arduino UNO
โครงงานนี้เป็นอีก 1 โครงงานเล็กๆ ซึ่งทดลองไว้และคิดว่าน่าจะเป็นไอเดียให้กับผู้อ่านได้จึงนำมาแชร์เพิ่มเติมคือ การทดลองควบคุมอุปกรณ์ที่ชื่อว่า Linear Actuator ซึ่งเป็นอุปกรณ์ประเภทหนึ่งที่ต้องใช้การควบคุมเพื่อให้สามารถทำงานได้ตามที่ต้องการคือ การปรับระยะการเคลื่อนที่ของแกนชักให้อยู่ในระดับที่กำหนด โครงสร้างภายในของ Linear Actuator สำหรับควบคุมการทำงานนั้น จะเป็น DC Motor ซึ่งเราจะต้องจ่ายกำลังไฟฟ้าเข้าไป โดยจะมีทิศทางการเคลื่อนที่ 2 ลักษณะคือ เคลื่อนที่เข้าและเคลื่อนที่ออก ซึ่งโดยทั่วไปจะใช้วงจรอิเล็กทรอนิกส์ในการควบคุมการเคลื่อนที่เข้าและเคลื่อนที่ออก และวงจรอิเล็กทรอนิกส์ที่จะใช้ในการควบคุมนี้จะขึ้นอยู่กับความแม่นยำและความรวดเร็วในการเคลื่อนที่ของ Linear Actuator และลักษณะงานต่างๆ

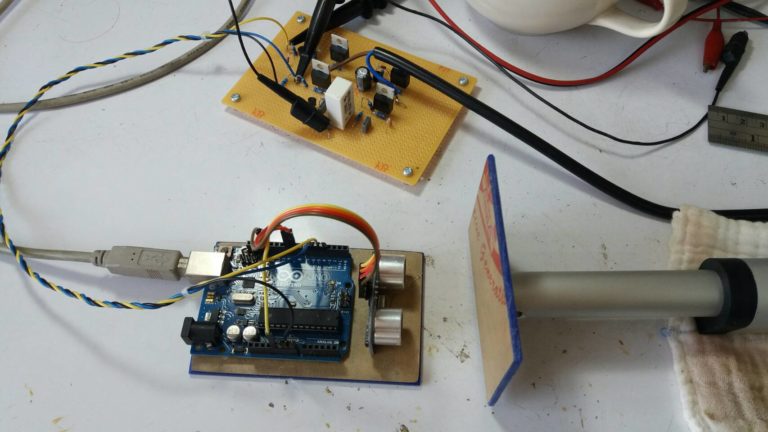
รูปที่ 1 แสดงลักษณะของตัว Linear Actuator ที่ใช้ในการทดลองที่มีระยะการเคลื่อนที่ประมาณ 200 มิลลิเมตร ที่แรงดันอินพุต 12VDC มีรูยึดของตัว Linear Actuator เข้ากับชิ้นงานต่างๆ สำหรับการเคลื่อนที่ 2 จุดและรับโหลดได้ที่ 125N
Model number: ZGB758F
Material: Aluminum alloy
Load capacity : 125N
Input Voltage : 12VDC
Speed: 42mm/s
Stroke Length : 200mm
Working frequency : 20%
Built-in limit switches,not adjustable after leave factory

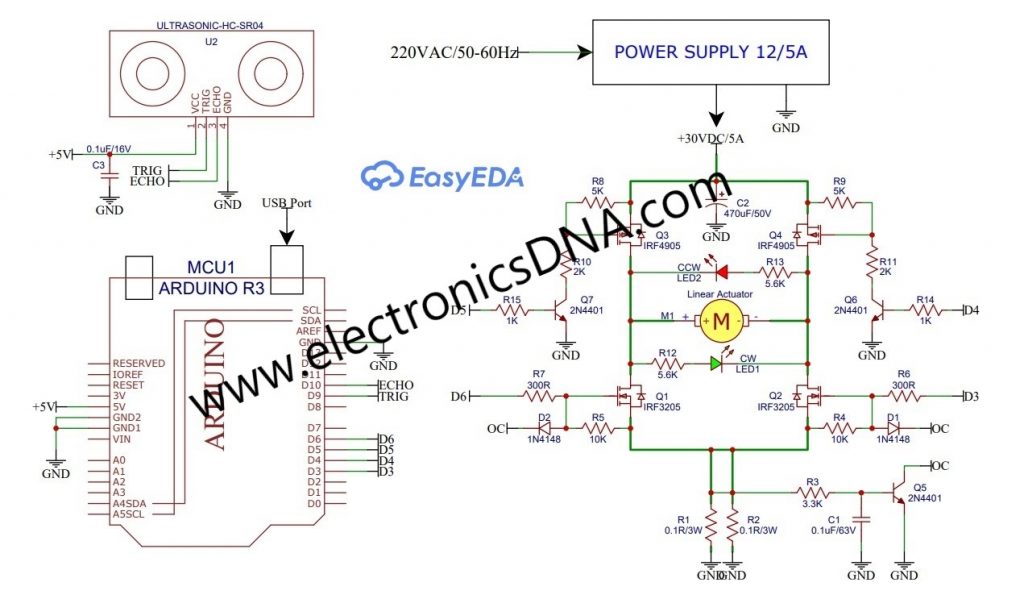
การทดลองนี้เป็นการใช้วงจรควบคุมการเคลื่อนที่แบบ H-Bridge เพื่อให้สามารถควบคุมการทำงานได้ง่ายด้วยการจ่ายสัญญาณลอจิก 0 และ 1 (ON/OFF) สามารถใช้ร่วมกับวงจรควบคุมลักษณะอื่นได้ง่าย หรือควบคุมในลักษณะของสัญญาณ PWM ก็ได้เช่นกันครับ

ในส่วนของตัวควบคุมทิศทางการหมุนนั้น จะใช้บอร์ด Arduino UNO ในการส่งสัญญาณควบคุมให้เป็นไปตามที่ต้องการ และสามารถพัฒนาให้ใช้งานตามรูปแบบของงานที่เราต้องการได้ด้วยการเขียนโปรแกรมใหม่นั้นเอง ซึ่งลักษณะการควบคุมจะมี 2 แบบคือ แบบรับคำสั่งการควบคุมการเคลื่อนที่จากภายนอก และการควบคุมการทำงานด้วยตัวเองให้อยู้ในระยะที่กำหนดอัตโนมัติ

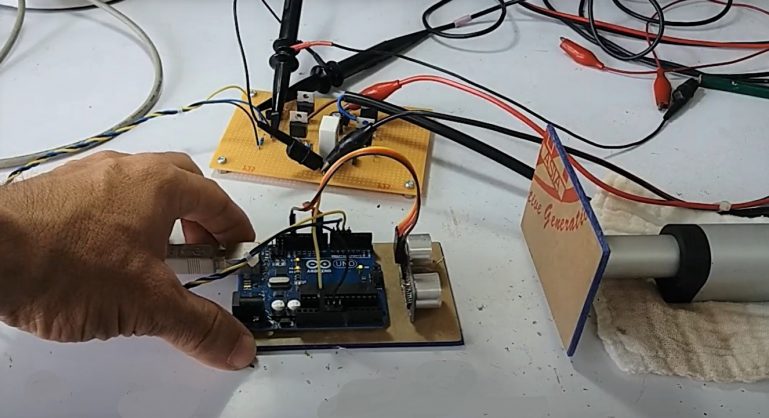
ในรูปที่ 4 ข้างบนนี้จะเป็นลักษณะของการประกอบอุปกรณ์ต่างๆ เข้าด้วยกัน ซึ่งจะมี 4 ส่วนใหญ่ๆ คือ ส่วนแรก บอร์ดควบคุมจะเป็น Arduino UNO ส่วนที่สอง จะเป็นตัวตรวจ (Sensor) จับระยะห่างจะใช้ Ultrasonic Sensor ส่วนที่สาม เป็นบอร์ดขับการเคลื่อนที่ของตัว Linear Actuator ซึ่งจะออกแบบในลักษณะของวงจรแบบ H-Bridge เพื่อให้สามารถเคลื่อนที่เข้าและออกได้ตามที่เราควบคุม และส่วนสุดท้าย เป็น Linear Actuator ทำหน้าที่เคลื่อนที่เพื่อควบคุมระห่างระหว่างเป็นตัวตรวจจับและแผ่นเพลตให้อยู่ในระยะที่กำหนด

สำหรับการนำ Linear Actuator ไปประยุกต์ใช้งานนั้น จะใช้งานได้ในหลายรูปแบบ เช่น ใช้ในระบบโซล่าเซลล์สำหรับหาตำแหน่งที่จะได้พลังงานสูงสุด (Maximum Power Point Tracking : MPPT) การนำมาใช้ในงานอุตสาหกรรมเพื่อปรับระยะการเปลี่ยนตำแหน่งต่างๆ (Position Control) หรือการปรับมุมรับของสัญญาณดาวเทียมให้อยู่ในตำแหน่งสัญญาณที่ดี เป็นต้น
Reference