Install Proximity speed sensor for 3 Phase Induction Motor
โครงงานนี้เป็นการติดตั้งพร็อกซิมิตี้เซนเซอร์เข้ากับมอเตอร์เหนี่ยวนำ 3 เฟส เพื่อวัดความเร็วรอบการหมุนของมอเตอร์ (RPM) ที่สัมพันธ์กับความถี่ที่เกิดขึ้น ซึ่งพร็อกซิมิตีเซ็นเซอร์ใช้งานง่ายและราคาไม่แพง สามารถเชื่อมต่อกับไมโครคอนโทรลเลอร์ได้ทันที และช่วยให้เราควบคุมความเร็วของมอเตอร์ได้ดีขึ้นเมื่อเราใช้กับระบบควบคุมความเร็วแบบปิด (Closed control system)

รูปที่ 1 แสดงลักษณะของตัวพร็อกซิมิตี้เซนเซอร์ ซึ่งในโครงงานนี้ใช้รุ่น LJ8A3-2-Z/BX-5V [6] ที่เราสามารถหาได้ง่าย (ซื้อออนไลน์ได้ครับ) รองรับแรงดันที่ 5V ซึ่งสามารถนำมาใช้งานร่วมกับไมโครคอนโทรลเลอร์ได้ทันที

รูปที่ 2 แสดงการทำขายึดให้กับพร็อกซิมิตี้เซนเซอร์ด้วยแผ่นอะคิลิกความหนา ขนาด 3 มิลลิเมตร โดยใช้ความร้อนดัดเป็นรูปตัวแอล (L) และเจาะรูสำหรับให้ตัวพร็อกซิมิตี้เซนเซอร์สามารถยึดได้และอยู่ในระยะที่เหมาะสม


รูปที่ 3 และ 4 เป็นลักษณะของการยึดพร็อกซิมิตี้เซนเซอร์เข้ากับขารับ เพื่อนำไปยึดกับฐานรับของตัวมอเตอร์ได้ง่าย และสามารถปรับระยะการตรวจจับวัตถุที่ด้านหน้าเซนเวอร์ได้เหมาะสม
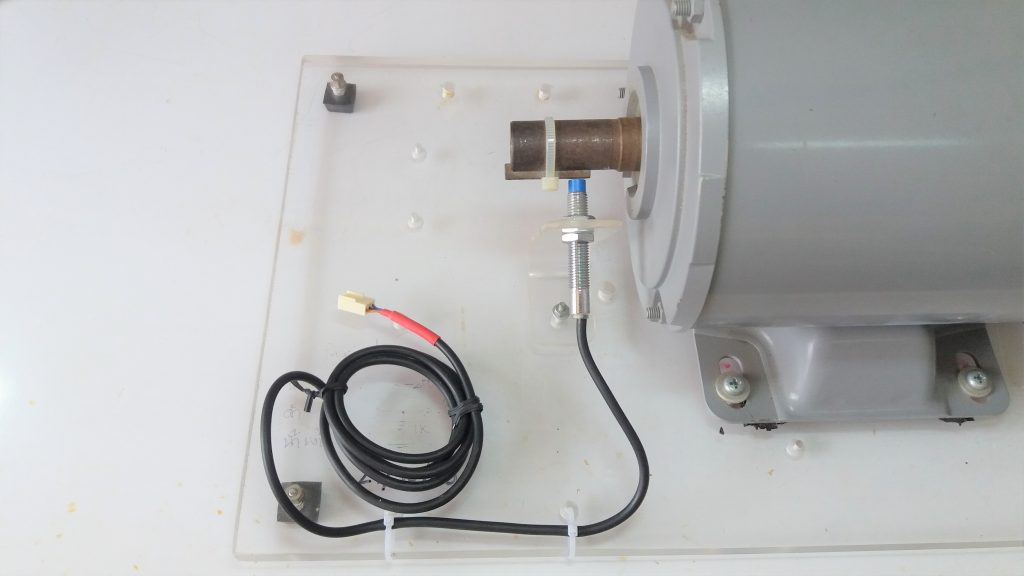

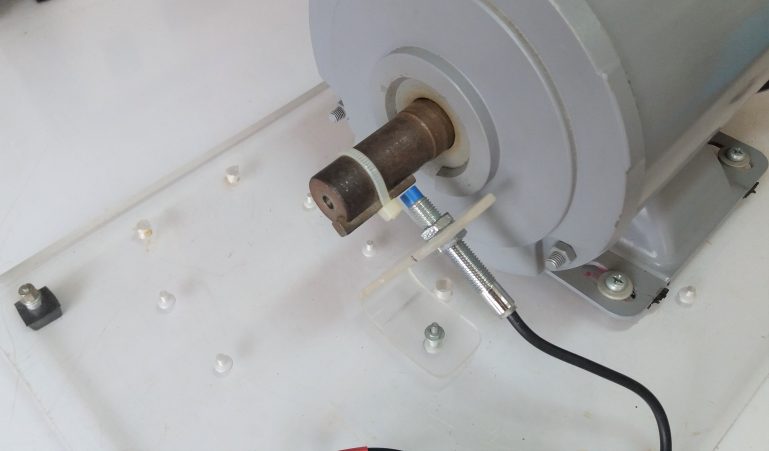
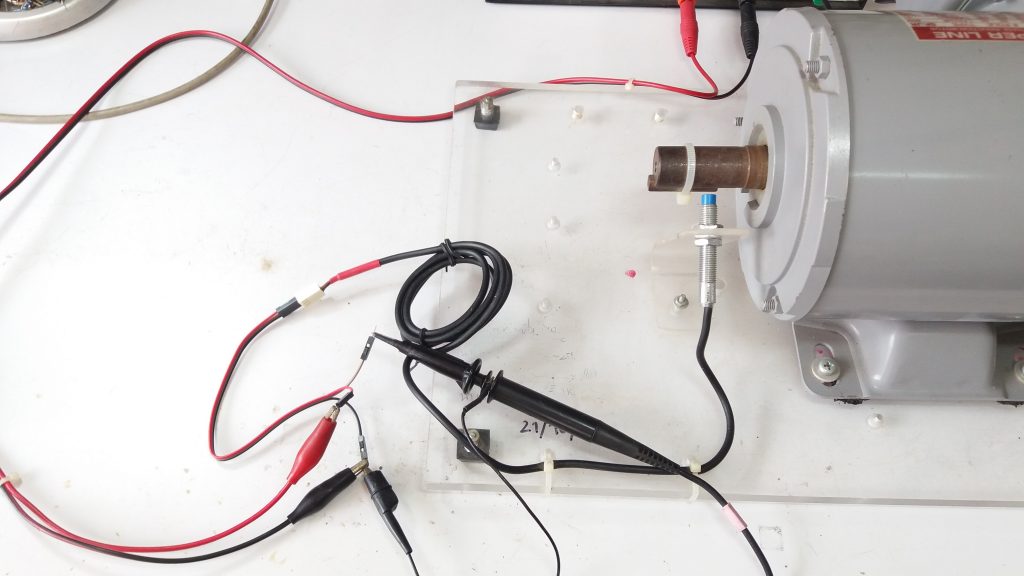
รูปที่ 5 และ 6 แสดงลักษณะของการยึดพร็อกซิมิตี้เซนเซอร์กับแท่นวางมอเตอร์ โดยจะวางในแนว 90 องศาระหว่างแกนของตัวมอเตอร์ นอกจากนี้เราสามารถนำสายต่อจากตัวพร็อกซิมิตี้เซนเซอร์นำไปต่อใช้งานกับบอร์ดไมโครคอนโทรลเลอร์ต่างๆ ได้ทันที
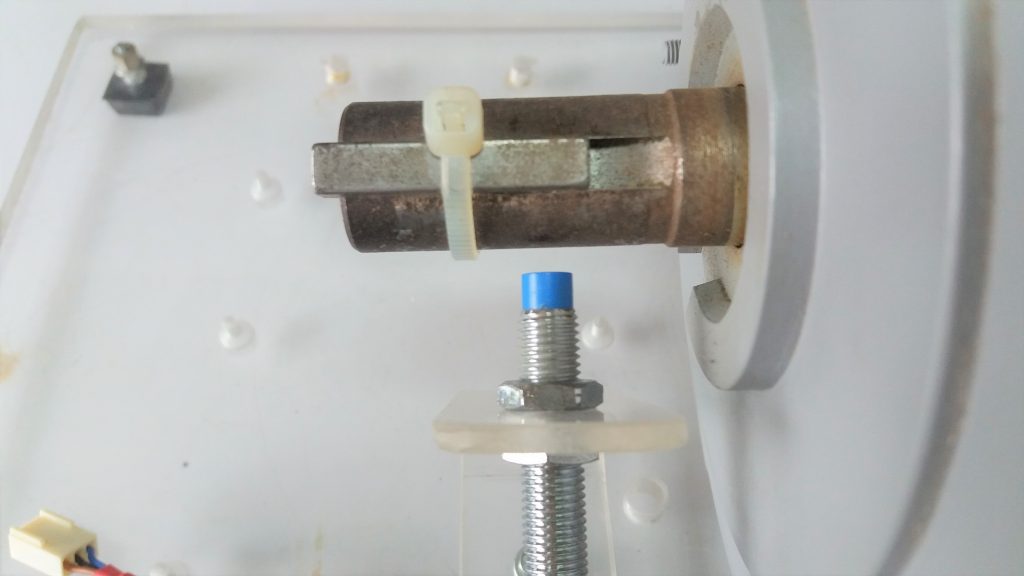
รูปที่ 7 เป็นการแสดงลักษณะของระยะห่างระหว่างสลักยึดแกนมอเตอร์กับตัวพร็อกซิมิตีเซนเซอร์ในช่วงระยะรอบยังไม่มาเจอกัน โดยในช่วงนี้ตัวพร็อกซิมิตี้เซนเซอร์จะส่งสัญญาณลอจิก 0 (0V) ออกมาที่เอาต์พุต
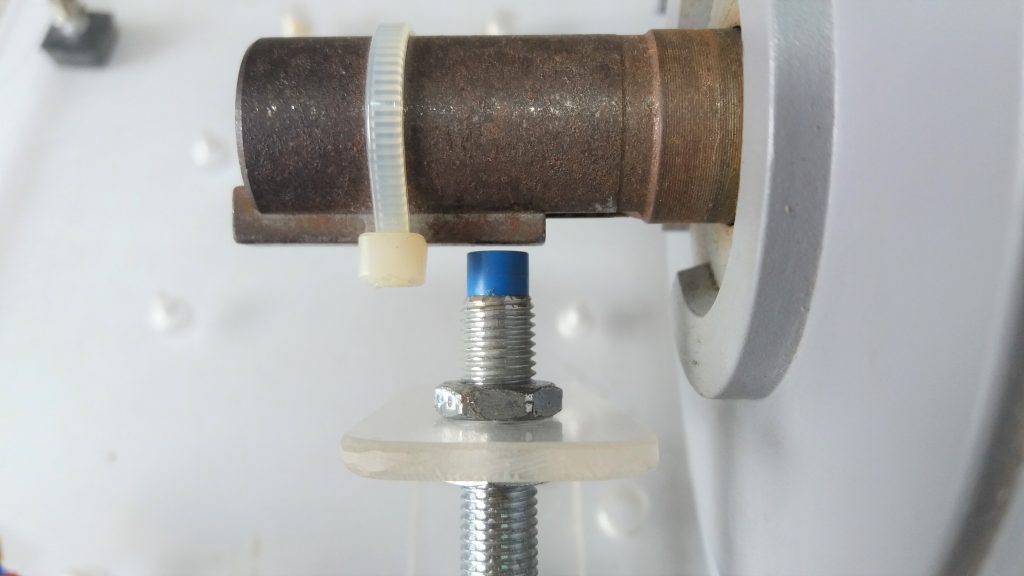
รูปที่ 8 เป็นการแสดงลักษณะของระยะห่างระหว่างสลักยึดแกนมอเตอร์กับตัวพร็อกซิมิตี้เซนเซอร์เมื่ออยู่ในช่วงระยะมาเจอกัน ซึ่งจะมีระยะห่างกันประมาณ 2 มิลลิเมตร โดยในช่วงนี้ตัวพร็อกซิมิตี้เซนเซอร์จะส่งสัญญาณลอจิก 1 (5Vp-p) ออกมาที่เอาต์พุต
รูปที่ 9 เป็นการทดลองวัดสัญญาณที่เกิดขึ้นจากตัวพร็อกซิมิตี้เซนเซอร์ ซึ่งตัวพร็อกซิมิตี้เซนเซอร์จะมีสายไฟด้วยกัน 3 เส้น คือ
- สายสีน้ำเงิน เป็นสายรับไฟเลี้ยง (+5V)
- สายสีดำ เป็นสายสัญญาณเอาต์พุตเป็นสัญญาณพัลซ์ (Pulse signal output)
- สายน้ำตาล จะเป็นสายกราวด์ (0V)
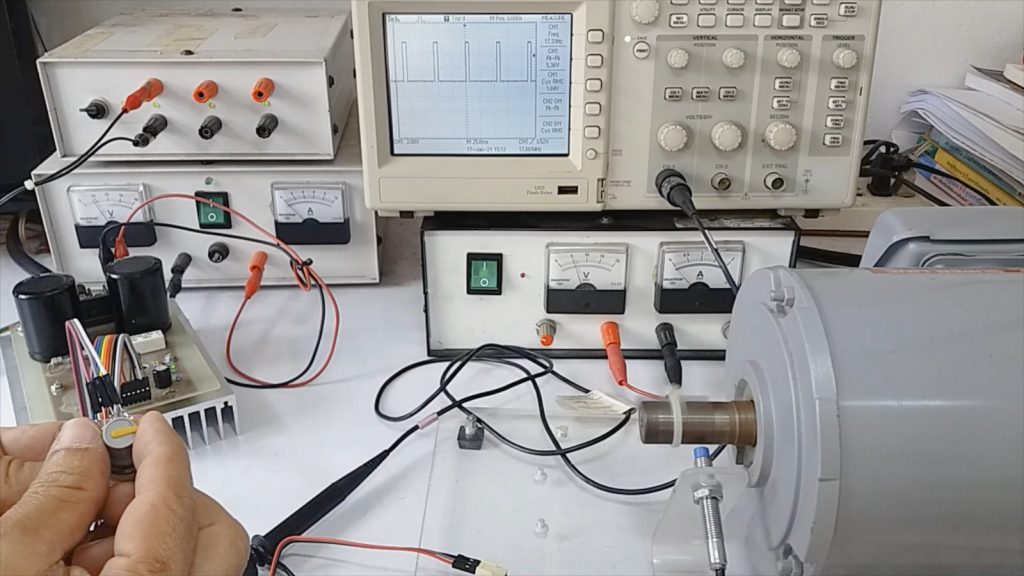
รูปที่ 10 ลักษณะของการติดตั้งพร็อกซิมิตี้เซนเซอร์ให้กับตัวมอเตอร์ แล้วทำการทดสอบปรับความเร็วรอบของตัวมอเตอร์ เพื่อสังเกตความสัมพันธ์ระหว่างความเร็วรอบกับความถี่ของสัญญาณพัลซ์ที่เกิดขึ้น
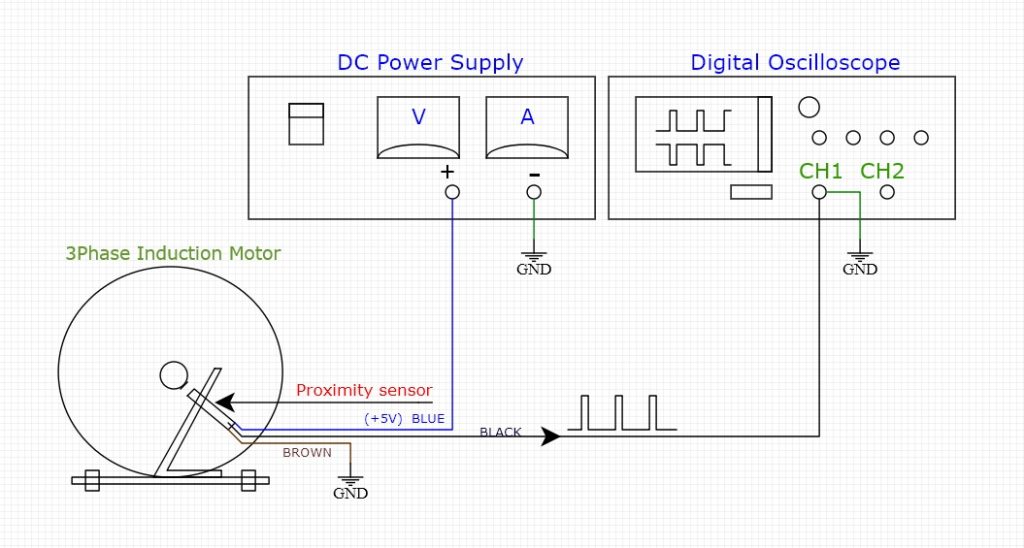
สำหรับโครงงานเล็กๆ นี้น่าจะเป็นประโยชน์กับท่านได้บ้างนะครับ ซึ่งทั้งนี้เราจะสามารถใช้สัญญาณพัลซ์ที่ได้ นำไปเป็นสัญญาณอินพุตให้กับระบบควบคุมต่างๆ ได้ทันที ในส่วนรูปผังการต่อวงจรต่างๆ ของการทดลองจะแสดงดังในรูปที่ 11 ซึ่งท่านสามารถนำไปไอเดียสำหรับนำไปใช้งานในแบบต่างๆได้ครับ.
Information
- https://en.wikipedia.org/wiki/Proximity_sensor
- http://www.ia.omron.com/support/guide/41/introduction.html
- http://www.omron-ap.co.nz/selection_guide/sensor/proximity_model.pdf
- https://realpars.com/proximity-sensor-datasheet/
- https://cdn.sick.com/media/docs/7/27/227/Product_information_IMM_Inductive_Proximity_Sensors_en_IM0061227.PDF
- https://www.amazon.com/LIYUDL-LJ8A3-2-Z-Inductive-Proximity-Sensor/dp/B075W5LQ1F