Differences between CCM and DCM for DC-DC Buck Converter
บทความนี้เป็นการเปรียบเทียบความแตกต่างของโหมดการทำงานกระแสที่ไหลผ่านตัวเหนี่ยวนำให้กับวงจรดีซี ทู ดีซี คอนเวอร์เตอร์ (DC-DC Converter) เพื่อให้เรียนรู้เกี่ยวจุดเด่นและจุดด้อยของแต่ละโหมดการทำงาน รวมทั้งการเลือกโหมดสำหรับนำไปใช้งานของดีซี ทู ดีซี คอนเวอร์เตอร์ได้อย่างเหมาะสม ซึ่งโหมดการทำงานของกระแสที่ไหลผ่านตัวเหนี่ยวนำโดยทั้วไปจะมี 2 โหมดหลักคือ โหมดนำกระแสต่อเนื่อง (CCM) และโหมดนำกระแสไม่ต่อเนื่อง (DCM) ดังนี้คือ
1. โหมดนำกระแสต่อเนื่อง : Continuous Conduction Mode (CCM)
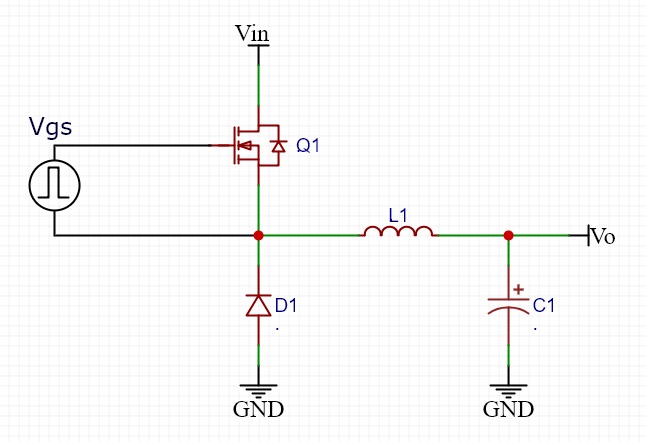
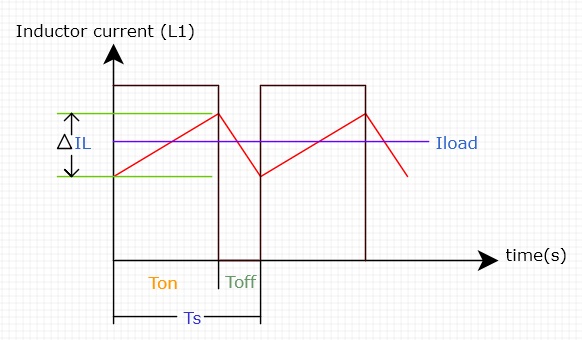
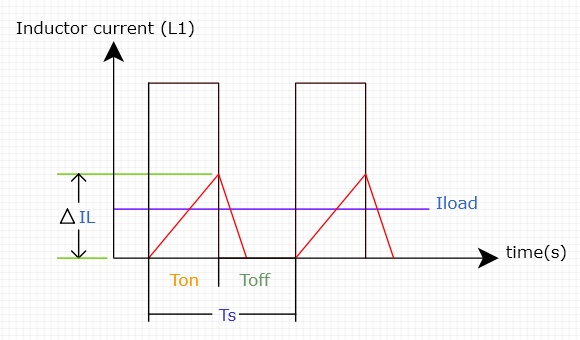
ในโหมดการทำงานกระแสต่อเนื่องคือ กระแสที่ไหลผ่านตัวเหนี่ยวนำ (Inductor current, IL) จะไม่ลดลงต่ำถึงศูนย์ในรอบการทำงาน (Switching cycle) ของคอนเวอร์เตอร์ ซึ่งหมายความว่า ตัวเหนี่ยวนำจะมีการสะสมพลังงานและคายพลังงานออกไปอย่างต่อเนื่อง โดยที่มีกระแสไหลค้างอยู่ในตัวเหนี่ยวนำเสมอแม้ในขณะที่สวิตช์กำลัง (Q1) จะหยุดการนำกระแส ในช่วงหยุด (Toff) ดังแสดงในรูปที่ 2 สัญญาณกระแสสีแดง (ลักษณะฟันเลื่อย)
ลักษณะของกระแสในตัวเหนี่ยวนำในโหมดนำกระแสต่อเนื่อง
1. กระแส IL จะเพิ่มขึ้นเป็นเชิงเส้นในระหว่างที่สวิตช์กำลัง (Q1) นำกระแส (Ton)
2. กระแส IL จะลดลงเป็นเชิงเส้นในระหว่างที่สวิตช์กำลัง (Q1) หยุดนำกระแส (Toff)
3. ค่ากระแสต่ำสุด (IL,min) ในแต่ละรอบจะมากกว่าศูนย์เสมอ
สัญญาณกระแสในตัวเหนี่ยวนำ (Inductor Current : IL1) ในโหมด CCM
ข้อดีของ CCM
1. กระแสริปเปิล (Current Ripple) ต่ำ การที่กระแสไม่ลดลงถึงศูนย์ทำให้ค่าการเปลี่ยนแปลงของกระแสในแต่ละรอบมีค่าน้อย ช่วยให้กระแสที่ส่งไปยังโหลดมีความต่อเนื่องและราบเรียบ
2. เหมาะสำหรับการจ่ายกระแสโหลดสูง โหมด CCM สามารถจ่ายกระแสได้สูงและคงที่
3. ควบคุมง่ายกว่า ในบางวงจรการทำงานในโหมดกระแสต่อเนื่อง จะสามารถการควบคุมการทำงานได้ดีกว่าและสามารถคาดเดาการทำงานได้มากกว่า
ข้อเสียของ CCM
1. ขนาดตัวเหนี่ยวนำใหญ่ขึ้น เนื่องจากต้องการค่าความเหนี่ยวนำที่สูงกว่า เพื่อรักษากระแสให้ต่อเนื่องของการทำงาน
2. เกิดพลังงานการสูญเสียที่ตัวไดโอด (Diode Reverse Recovery Loss) ในช่วงที่ไดโอดถูกไบอัสกลับ อาจมีการไหลของกระแสย้อนกลับเล็กน้อยทำให้เกิดการสูญเสียพลังงานขึ้น
3. ประสิทธิภาพของวงจรลดลงที่กระแสโหลดต่ำ ในกรณีที่กระแสโหลดต่ำ จะมีกระแสที่ไหลวนในตัวเหนี่ยวนำที่อาจทำให้เกิดพลังงานสูญเสียในสวิตช์และไดโอดโดยไม่จำเป็น
2. โหมดนำกระแสไม่ต่อเนื่อง : Discontinuous Conduction Mode (DCM)
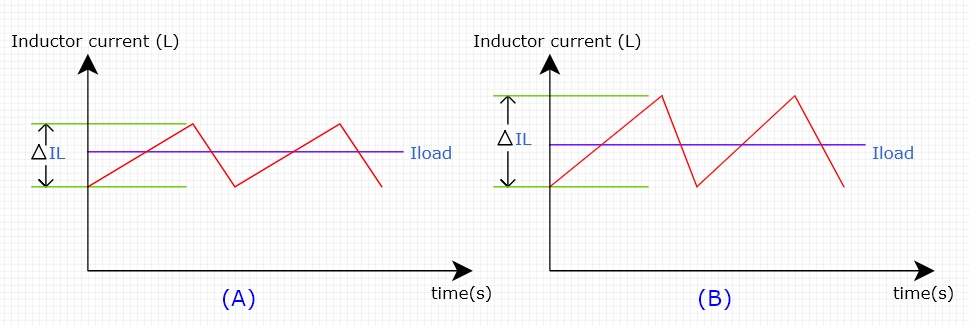
สำหรับในโหมดกระแสไม่ต่อเนื่อง จะสังเกตเห็นว่ากระแสที่ไหลผ่านตัวเหนี่ยวนำ (IL) ในรูปที่ 4 (สัญญาณสีแดง) จะลดลงถึงศูนย์ในระหว่างรอบการทำงาน และคงอยู่ที่ศูนย์เป็นระยะเวลาหนึ่ง ก่อนที่สวิตช์กำลัง (Q1) จะoeditclอีกครั้งเพื่อเริ่มรอบการทำงานใหม่ ซึ่งหมายความว่าตัวเหนี่ยวนำจะคายพลังงานที่สะสมไว้ทั้งหมดออกไปจนหมดและไม่มีกระแสไหลผ่านในช่วงเวลาหนึ่งของแต่ละรอบการทำงาน
ลักษณะของกระแสในตัวเหนี่ยวนำ
1. กระแส IL จะเพิ่มขึ้นเป็นเชิงเส้นในระหว่างที่สวิตช์กำลัง (Q1) นำกระแส (Ton)
2. กระแส IL จะลดลงเป็นเชิงเส้นในระหว่างที่สวิตช์กำลัง (Q1) หยุดนำกระแส (Toff) และจะถึงศูนย์
3. มีช่วงเวลาที่กระแส IL เป็นศูนย์เกิดขึ้น ก่อนที่รอบการทำงานถัดไปจะเริ่มต้น
สัญญาณกระแสในตัวเหนี่ยวนำ (Inductor Current : IL1) ในโหมด DCM
ข้อดีของ DCM
1. ขนาดตัวเหนี่ยวนำเล็กลง เนื่องจากสามารถใช้ค่าความเหนี่ยวนำที่น้อยลง ซึ่งทำให้กระแสลดลงถึงศูนย์ ช่วยให้ลดต้นทุนของการออกแบบวงจร
2. ประสิทธิภาพสูงขึ้นเมื่อจ่ายกระแสโหลดน้อย เนื่องจากไม่มีกระแสไหลวนค้างในตัวเหนี่ยวนำ ในช่วงเวลาที่ไม่มีการส่งถ่ายพลังงาน ช่วยลดพลังงานสูญเสียในสวิตช์กำลัง (Q1) และตัวไดโอด
3. ลดพลังงานสูญเสียของตัวไดโอด (Zero Reverse Recovery Loss) เนื่องจากกระแสที่ไหลผ่านในตัวไดโอดลดลงถึงศูนย์ ทำให้ไม่เกิดพลังงานสูญเสียที่ตัวไดโอดแต่อย่างใด
ข้อเสียของ DCM
1. กระแสริปเปิลสูงกว่า เนื่องจาดกระแสเริ่มต้นจากศูนย์ในแต่ละรอบ ทำให้เกิดค่ากระแสพีกสูงกว่าแบบ ในโหมดกระแสต่อเนื่อง CCM เมื่อเทียบการจ่ายกำลังไฟฟ้าทางด้านเอาต์พุตที่เท่ากัน
2. กระแสอินพุตและเอาต์พุตมีริปเปิลสูง ต้องใช้วงจรตัวกรองความถี่เพิ่มขึ้น โดยเฉพาะที่เอาต์พุตเพื่อทำให้แรงดันเอาต์พุตมัสัญญาณรบกวนน้อยที่สุด
3. เหมาะสำหรับการจ่ายกระแสโหลดน้อยถึงปานกลาง ทั้งนี้ถ้าให้วงจรจ่ายกระแสโหลดสูง อาจทำให้กระแสพีกในตัวเหนี่ยวนำเพิ่มสูงมากขึ้นและเกิดการความเสียหายในวงจรขึ้นได้
4. แรงดันเอาต์พุตขึ้นอยู่กับกระแสโหลด อัตราส่วนของการแปลงแรงดัน (Voltage Conversion Ratio) ในโหมด DCM จะขึ้นอยู่กับกระแสโหลดด้วย ซึ่งแตกต่างจาก CCM ที่มักจะขึ้นอยู่กับ Duty Cycle เท่านั้น
ตารางสรุปความแตกต่างของโหมดหมดการทำงาน CCM และ DCM
| กระแสในตัวเหนี่ยวนำ | กระแสลดลงไม่ถึงศูนย์ | ลดลงถึงศูนย์และอยู่ที่ศูนย์เป็นระยะเวลาหนึ่ง |
| ขนาดตัวเหนี่ยวนำ | ขนาดใหญ่ | ขนาดเล็กลง |
| กระแสริปเปิล | น้อย | มาก |
| ประสิทธิภาพ | สูงเมื่อจ่ายกระแสโหลดมาก แต่จะต่ำลงเมื่อกระแสโหลดน้อย | สูงเมื่อจ่ายกระแสโหลดน้อยถึงปานกลาง |
| การสูญเสียที่ไดโอด | มีการสูญเสียพลังงานจากไดโอด | ไม่มี (Zero Reverse Recovery Loss) |
| ความซับซ้อนของการควบคุม | ซับซ้อนน้อยกว่า | ซับซ้อนปานกลาง (ในบางกรณี) |
| แรงดันเอาต์พุต | ขึ้นอยู่กับค่า Duty Cycle เท่านั้น (สำหรับคอนเวอร์เตอร์ในอุดมคติ) | ขึ้นอยู่กับค่า Duty Cycle และกระแสโหลด |
| การใช้งาน | เหมาะสำหรับวงจรที่ต้องการจ่ายกำลังให้โหลดสูงและกระแสราบเรียบ | เหมาะสำหรับการออกแบบวงจรขนาดเล็ก ให้ประสิทธิภาพสูงที่กระแสโหลดต่ำ |
การเลือกโหมดการทำงานให้กับวงจรบักคอนเวอร์เตอร์
การเลือกโหมดกระแสที่ไหลผ่านตัวเหนี่ยวนำให้กับวงจรบักคอนเวอร์เตอร์แบบ CCM หรือ DCM ขึ้นอยู่กับการออกแบบและข้อกำหนดของการนำวงจรไปประยุกต์ใช้งานต่างๆ โดยจะพิจารณาดังนี้
การออกในโหมดกระแสต่อเนื่อง (CCM) จะนิยมใช้ในวงจรบักคอนเวอร์เตอร์ ที่จะต้องการจ่ายกำลังไฟฟ้าให้กับโหลดสูงและต้องการการควบคุมค่าแรงดันและกระแสทางด้านเอาต์พุตที่มีเสถียรภาพ
การออกในโหมดกระแสไม่ต่อเนื่อง (DCM) จะใช้ในวงจรบักคอนเวอร์เตอร์ ที่จะต้องจ่ายกำลังไฟฟ้าให้กับโหลดน้อยถึงปานกลาง โดยจะเน้นในเรื่องของการให้ประสิทธิภาพสูงที่กระแสโหลดน้อยๆ การใช้วงจรขนาดเล็กและการควบคุมการทำงานได้ไม่ยากมากนัก นอกจากนี้ยังมีวงจรคอนเวอร์เตอร์ที่ออกแบบมาให้สามารถทำงานระหว่างโหมดกรแสต่อเนื่อง เมื่อคอนเวอร์เตอร์ต้องจ่ายกระแสโหลดสูงและสามารถเปลี่ยนไปทำงานในโหมดกระแสไม่ต่อเนื่องเมื่อคอนเวอร์เตอร์จะต้องจ่ายกระแสโหลดน้อยลง ซึ่งเรียกว่า Boundary Conduction Mode (BCM) หรือ Critical Conduction Mode (CRM) โดยที่กระแสในตัวเหนี่ยวนำจะลดลงถึงศูนย์พอดีก่อนที่รอบการทำงานใหม่จะเริ่มขึ้น ซึ่งเป็นการทำงานระหว่างโหมดทั้งสองที่กล่าวมา
ตัวอย่างที่ 1 การออกแบบวงจรบักคอนเวอร์เตอร์แบบที่ 1
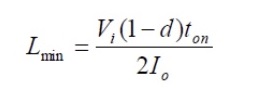
เมื่อกำหนดให้ Vi = 40V, Vo = 5V, Io = 1A, Po = 5W, f = 50kHz และหาค่า Lmin ที่น้อยสุด ซึ่งยังคงทำให้วงจรบักคอนเวอร์เตอร์ทำงานในโหมดกระแสต่อเนื่อง (CCM Mode) [Ref.6]
d = Vo/Vi = 5V/40V = 0.125
ton = dT = d/f = 0.125/50kHz = 2.5uS
Lmin = (40V(1-0.125)2.5uS)/(2(1)) = 43.75uH
*** ในกรณีที่ใช้ตัวเหนี่ยวนำน้อยกว่า 43.75uH จะส่งผลให้วงจรเข้าสู่โหมดการทำงานกระแสไม่ต่อเนื่อง (DCM Mode)
ตัวอย่างที่ 2 การออกแบบวงจรบักคอนเวอร์เตอร์แบบที่ 2
1. พิจารณาค่ากระแสริปเปิลของตัวเหนี่ยวนำ (ΔIL) ที่ 25-40% ของกระแสเอาต์พุตสูงสุด (Io) ซึ่งจะได้ค่าตัวเหนี่ยวนำที่เหมาะสมและคงสถานะโหมดกระแสต่อเนื่อง (CCM) และหลีกเลี่ยงการเข้าสู่โหมดกระแสไม่ต่อเนื่อง (DCM)
(ΔIL) = 0.40*Iload เมื่อทราบค่า Iload และกำหนดค่ากระแสริปเปิลที่ 40%
(ΔIL) = ((Vi-Vo)/(L*fs))*(Vo/Vi) เมื่อกำหนดค่าตัวเหนี่ยวนำและความถี่สวิตชิ่ง
2. ค่าตัวเหนี่ยวนำที่เหมาะสมและคงสถานะโหมดกระแสต่อเนื่องคือ
L = ((Vi-Vo)/(ΔIL*fs))*(Vo/Vi)
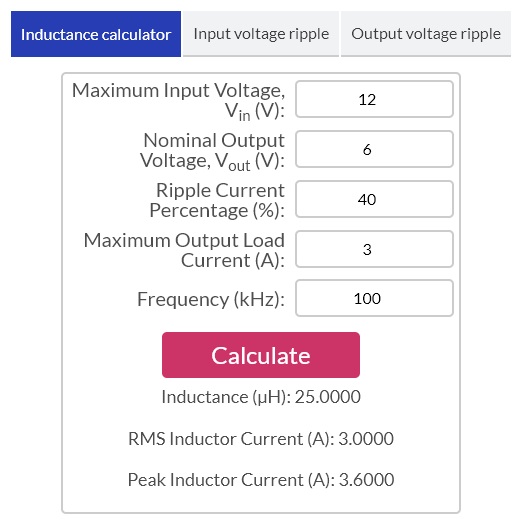
3. เมื่อกำหนดให้ Vi = 12V, Vo = 6V, Io = 3A, (ΔIL) = 40%, fs = 100kHz เพื่อคำนวณหาค่า L ที่น้อยสุด โดยยังคงให้วงจรบักคอนเวอร์เตอร์ทำงานในโหมดกระแสต่อเนื่อง (CCM Mode) [Ref.11] จากนั้นจะป้อนค่าตัวแปรไปยังโปรแกรมคำนวณที่หน้าเว็บไซต์ https://analogcircuitdesign.com/buck-converter/ ซึ่งการคำนวณค่า L ที่ได้เท่ากับ 25uH ส่วนการคำนวณค่าแรงดันริปเปิลทางด้านอินพุตและเอาต์พุตสามารถป้อนค่าตัวแปรในแท็บเมนูถัดไปดังแสดงในรูปที่ 5
ในบทความนี้เป็นเนื้อหาเบื้องต้นของโหมดการทำงานกระแสที่ไหลผ่านตัวเหนี่ยวนำให้กับวงจรดีซี ทู ดีซี คอนเวอร์เตอร์ (DC-DC Converter) ทั้งสองแบบคือโหมดกระแสต่อเนื่อง (CCM) และโหมดนำกระแสไม่ต่อเนื่อง (DCM) ทั้งนี้เนื้อคงพอจะเป็นแนวทางสำหรับออกแบบวงจรดีซี ทู ดีซี คอนเวอร์เตอร์ หรือแหล่งจ่ายไฟเลี้ยงสวิตชิ่งโหมดเพาเวอร์ซัพพลายต่างๆ ให้สามารถทำงานได้อย่างมีประสิทธิภาพยิ่งขึ้น
Reference
- https://product.torexsemi.com/en/technical-support/techfaq/doc_2071
- https://www.monolithicpower.com/en/learning/resources/the-difference-between-ccm-and-dcm-explained
- https://www.quora.com/What-is-differences-between-CCM-and-DCM-mode-in-buck-boost-converter-How-can-I-choose-the-right-mode
- https://sciamble.com/resources/pe-drives-lab/basic-pe/buck-converter
- https://www.engr.colostate.edu/ECE562/98lectures/l37.pdf
- https://electronics.stackexchange.com/questions/663891/minimum-inductance-for-buck-converter-to-maintain-ccm
- https://www.electricaltechnology.org/2020/09/buck-converter.html
- https://www.youtube.com/watch?v=TB4PqvRy0w4
- https://www.youtube.com/watch?v=wzigsyDVbOg
- https://www.power-mag.com/pdf/feature_pdf/1465993242_MonoPower_Feature.pdf
- https://analogcircuitdesign.com/buck-converter/
- https://electronicsbeliever.com/sizing-the-inductor-of-buck-converter-and-setting-its-operation/
- https://sciamble.com/resources/pe-drives-lab/basic-pe/buck-converter-dcm
- https://sciamble.com/resources/pe-drives-lab/basic-pe/buck-converter
- https://gemini.google.com/