Arduino Speed Control 3 Phase Induction Motor by TM-35 (V.1)

สำหรับโครงงานนี้เป็นการนำเพาเวอร์โมดูลไอจีบีที TM-35 (Intelligent Power Module : IPM) ซึ่งเป็นที่นิยมใช้งานมาเป็นตัวขับกำลังให้กับมอเตอร์ 3 เฟส (3 Phase Induction Motor) ทั้งนี้เพราะในตัวโมดูลจะออกแบบมาสำเร็จให้ใช้งานได้ง่าย ด้วยการต่อไฟเลี้ยงแรงดันสูงเพียงอย่างเดียวและตัวมอเตอร์ ก็สามารถส่งสัญญาณควบคุม (PWM Signal) เข้ามายังขาอินพุตได้ทันที โดยในโครงงานนี้จะเป็นการทดลองใช้งานครั้งแรก (เวอร์ชั่น 1) สำหรับเพาเวอร์โมดูลเบอร์นี้และจะใช้บอร์ดควบคุม Arduino UNO ในการสร้างสัญญาณควบคุม
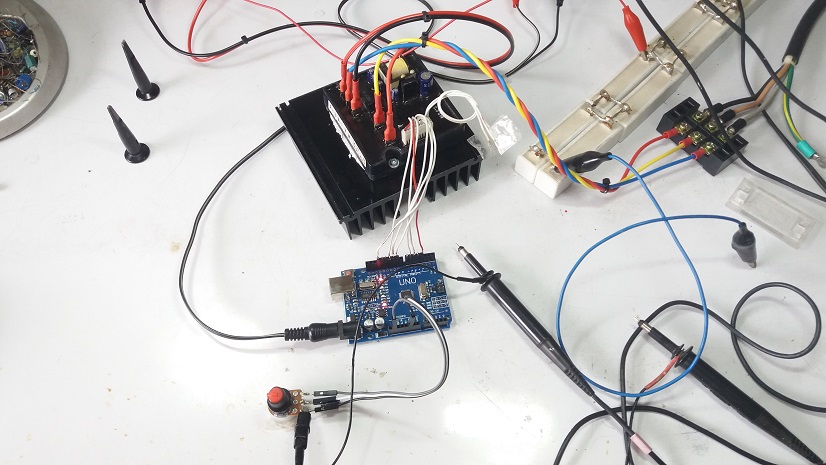
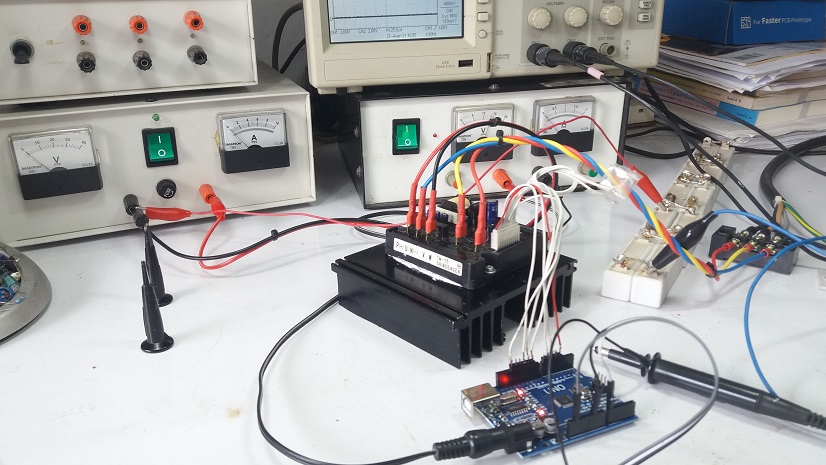
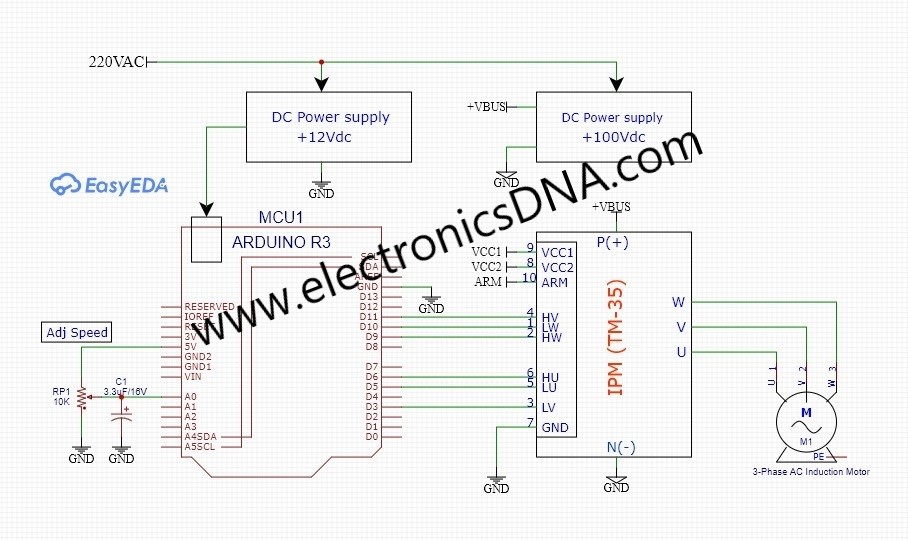
รูปที่ 1 เป็นการต่อวงจรระหว่างเพาเวอร์โมดูล TM-35 และบอร์ดควบคุม Arduino UNO โดยเป็นการต่อแบบง่ายสำหรับทดลองการทำงานเบื้องต้น ซึ่งการปรับความเร็วรอบมอเตอร์จะใช้ตัวต้านทานปรับค่า (VR) ที่ต่อกับบอร์ดควบคุม Arduino UNO
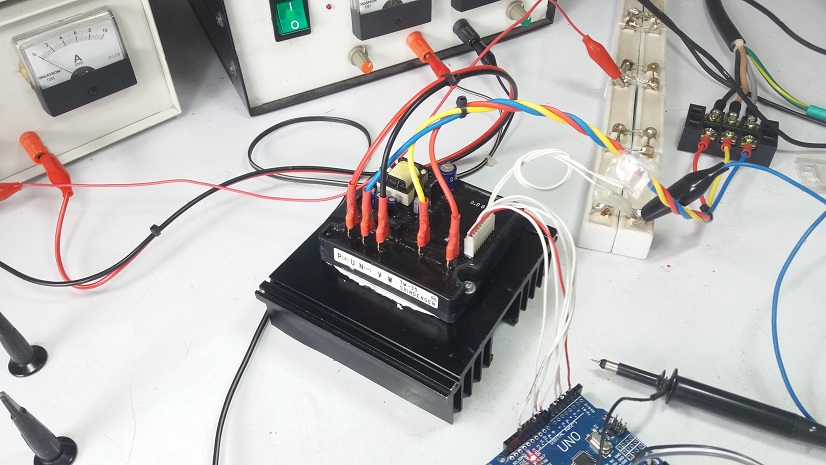
รูปที่ 2 แสดงลักษณะของการต่อสายไฟระหว่างบอร์ดควบคุม Arduino UNO และเพาเวอร์โมดูล TM-35 ซึงจะต้องใช้คอนเน็กเตอร์ตัวเมียขนาดพอดีกับคอนเน็กเตอร์ของตัวเพาเวอร์โมดูล TM-35 เพื่อให้การเชื่อมต่อได้ดี
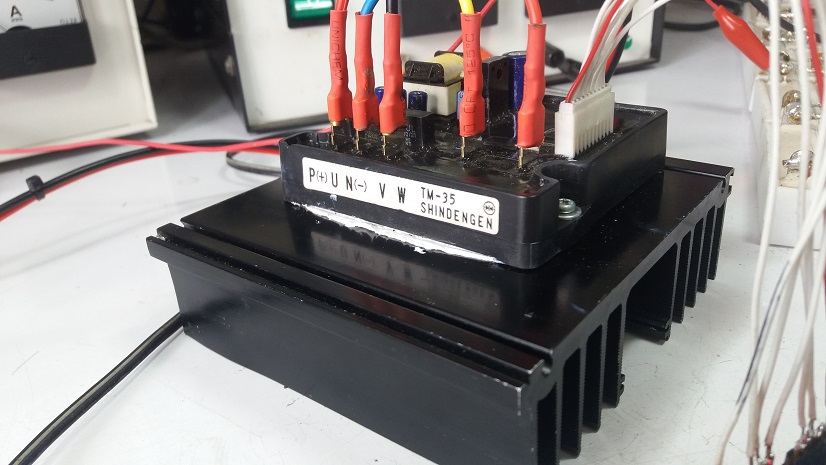
ในรูปที่ 3 แสดงการยึดตัวโมดูลเพาเวอร์ไอจีบีทีเข้ากับฮีตซิ้ง ซึ่งฮีตซิ้งขนาด 11cmX11cmX3.5cm และทาซิลิโคนเล็กน้อยระหว่างโมดูลเพาเวอร์ไอจีบีทีและฮีตซิ้ง ทั้งนี้เพื่อให้ความร้อนถ่ายเทมายังฮีตซิ้งได้ดีขึ้น
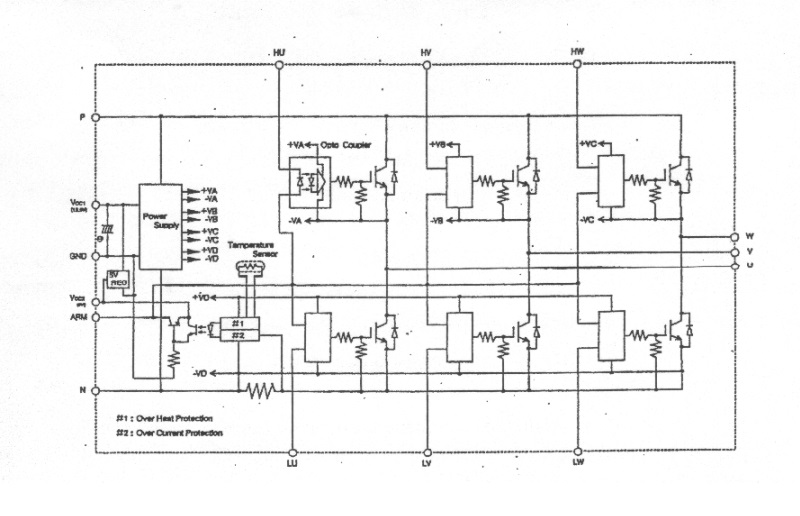
รูปที่ 4 จะเป็นบล็อกไดอะแกรมภายในเพาเวอร์ไอจีบีที TM-35 (ซึ่งระยะหลังจะค่อนข้างหาข้อมูลเกี่ยวกับเพาเวอร์โมดูลยากขึ้น) ซึ่งจะประกอบด้วยไอจีบีที 6 ตัวสำหรับขับมอเตอร์ มีวงจรป้องกันกระแสเกินและอุณหภูมิเกิน มีแหล่งจ่ายไฟเลี้ยงออกมา 2 ส่วนคือ ที่ประมาณ +13.5VDC และ +5VDC ที่เราสามารถนำมาต่อใช้งานได้
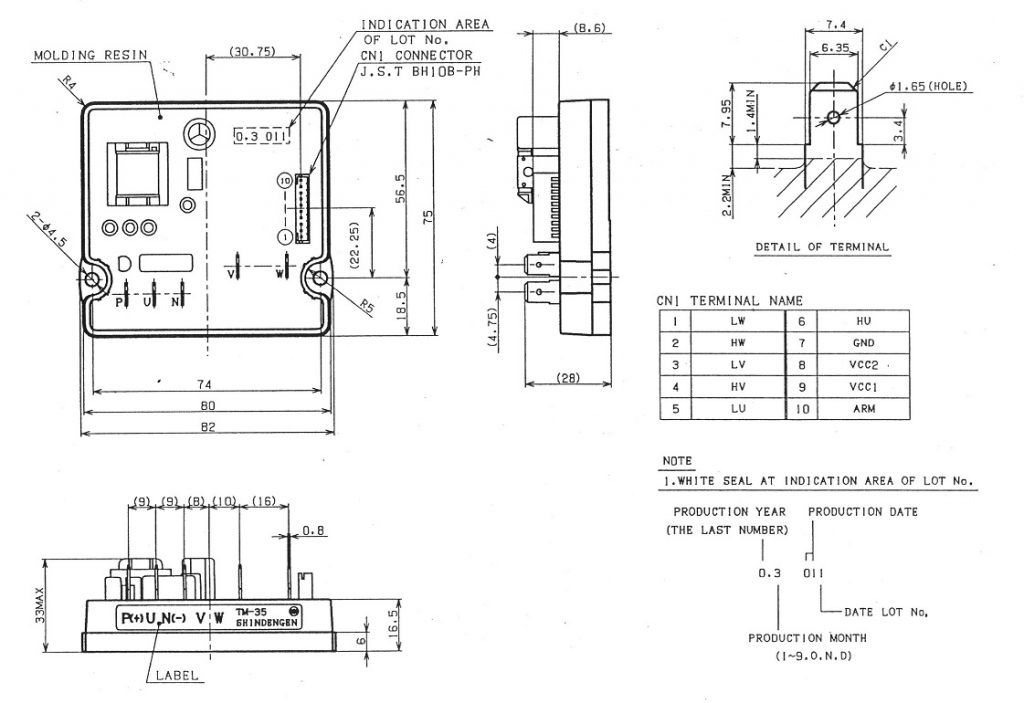
รูปที่ 5 แสดงขาต่อใช้งานที่คอนเน็กเตอร์อินพุตและตำแหน่งขาที่ 1 ถึงขาที่ 10, ขาต่อรับไฟเลี้ยงแรงดันสูง (P(+) N(-)), ขาเอาต์พุตสำหรับขับมอเตอร์ (U V W), ลักษณะขนาดตัวถังต่างๆ ของเพาเวอร์ไอจีบีทีสำหรับการติดตั้งและออกแบบแผ่นวงจรพิมพ์ (PCB)
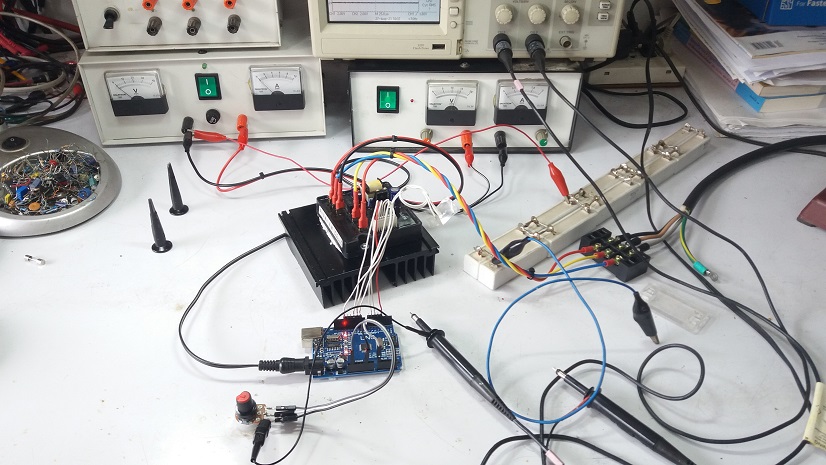
รูปที่ 6 และรูปที่ 7 แสดงลักษณะของการทดลองเบื้องด้นของโครงงาน โดยในรูปที่ 7 จะเห็นตัวต้านทานที่นำมาใช้ในการทดลองเบื้องต้นแทนตัวมอเตอร์ ทั้งนี้เพื่อทดสอบการควบคุมกระแสเกินของตัวโมดูลและการทำงานของไอจีบีทีของส่วนด้านล่าง (Low Side) และด้านบน (High Side) จะต้องทำงานสัมพันธ์ระหว่างกันครับ

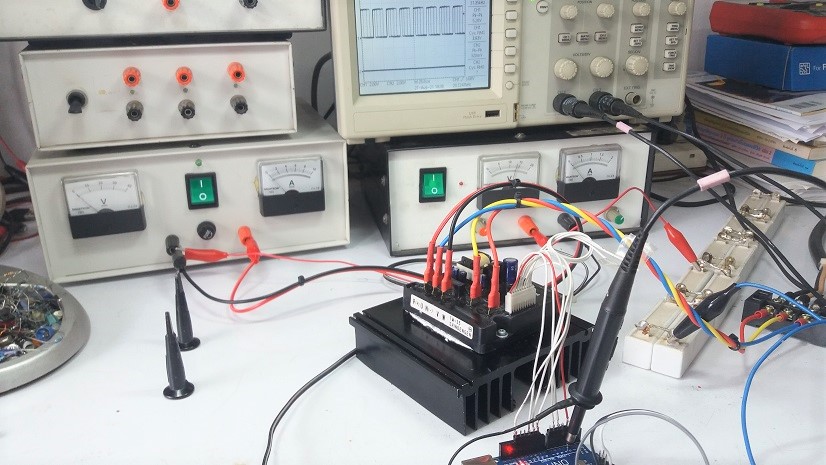
รูปที่ 9 แสดงการวัดสัญญาณพัลซ์วิดมอดูเลชั่นในระหว่างวงจรการควบคุมความเร็วมอเตอร์ โดยสุ่มวัดสัญญาณมา 1 ช่องเพื่อสังเกตความเปลี่ยนแปลงเมื่อปรับความเร็วให้กับมอเตอร์ (ในการทดลองนี้จะใช้แรงดันไฟเลี้ยงที่ค่อนข้างสูงผู้ทดลองจะต้องระวังในเรื่องอันตรายที่อาจเกิดขึ้นและควรมีวงจรหรืออุปกรณ์ป้องกันกระแสเกินสำหรับการทดลองครับ)
- โปรแกรมอ้างอิงในการทดลองมอเตอร์ —> : https://github.com/cmasenas/3-Phase-Sine-Arduino/blob/Release/DDS_Generator.ino
สำหรับการทดลองขับมอเตอร์กับโครงงานนี้ โดยส่วนตัวของแอดมินเองยังไม่สามารถปรับค่าแรงดันทดสอบไปที่แรงดันสูงกว่า 100VDC ได้เนื่องจาก แหล่งจ่ายไฟเลี้ยงแรงดันสูงจะดึงกระแสค่อนข้างสูง (มากกว่า 1A) ขณะที่ยังไม่ปรับความเร็วรอบแต่อย่างใด รวมทั้งการใช้ความถี่พาหะสวิตชิ่ง (Carrier-based PWM) ที่ประมาณ 3.9kHz ตัวมอเตอร์จะไม่หมุน แต่เมื่อเป็นความถี่พาหะสวิตชิ่งไปที่ประมาณ 31kHz มอเตอร์สามารถหมุนได้ ซึ่งในส่วนนี้จะปรับปรุงแก้ไขอีกครั้ง ทั้งนี้ระหว่างการทดลองโมดูลเพาเวอร์ไอจีบีทีที่เห็นได้เสียหายไปแล้ว และจะสั่งซื้อมาทดลองใหม่เพิ่มเติมให้สมบูรณ์ ท้ายนี้ได้นำการทดลองที่ผ่านมา มาแชร์ให้ผู้อ่านก่อนในเวอร์ชั่นที่ 1 นี้
*** ตอนที่ 2 ครับ —-> Arduino Speed Control 3 Phase Induction Motor by TM-35 (V.2)
Reference
- https://electronics-project-hub.com/3-phase-sine-wave-generator-code-arduino
- https://forum.arduino.cc/index.php?topic=236778.0
- https://github.com/cmasenas/3-Phase-Sine-Arduino/blob/Release/DDS_Generator.ino
- https://forum.arduino.cc/index.php?topic=121727.0
- http://interface.khm.de/index.php/lab/interfaces-advanced/arduino-dds-sinewave-generator/index.html
- http://www.berryjam.eu/2015/04/driving-bldc-gimbals-at-super-slow-speeds-with-arduino
- https://www.infineon.com/dgdl/AP1609710_different_PWM_for_three_phase_ACIM.pdf?fileId=db3a304412b407950112b40a1bf20453
- https://github.com/carneeki/OpenVFD/blob/master/software/OpenVFD.ino
- https://pdf.dzsc.com/FSB/FSBS10CH60.pdf
- https://www.onsemi.com/products/power-modules/intelligent-power-modules-ipms/fsbs10ch60
- http://smartguard2000.com/www.smartguard.org/indexbced.html?lay=show&ac=article&Id=539046650