Preliminary experiment with SPWM 3 Phase Induction Motor
การทดลองเบื้องต้นสำหรับการสร้างสัญญาณ Sine Wave Pulse Width Modulation : SPWM สำหรับมอเตอร์ 3 เฟส แบบอินดักชั่น ในการทดลองนี้ใช้ Arduino UNO ในการสร้างสัญญาณ SPWM 3 ช่อง ที่ขา D9, D10 และ D11 แล้วทำการวัดสัญญาณที่เกิดขึ้น จากนั้นจะใช้ RC ฟิลเตอร์ (RC Low pass filter) มาเชื่อมต่อที่ขา D9, D10 และ D11 อีกครั้ง เพื่อทำให้สัญญาณเป็นคลื่นไซน์เวฟ จากนั้นตรวจสอบความถูกต้องและลักษณะของสัญญาณที่เกิดขึ้นอีกครั้ง
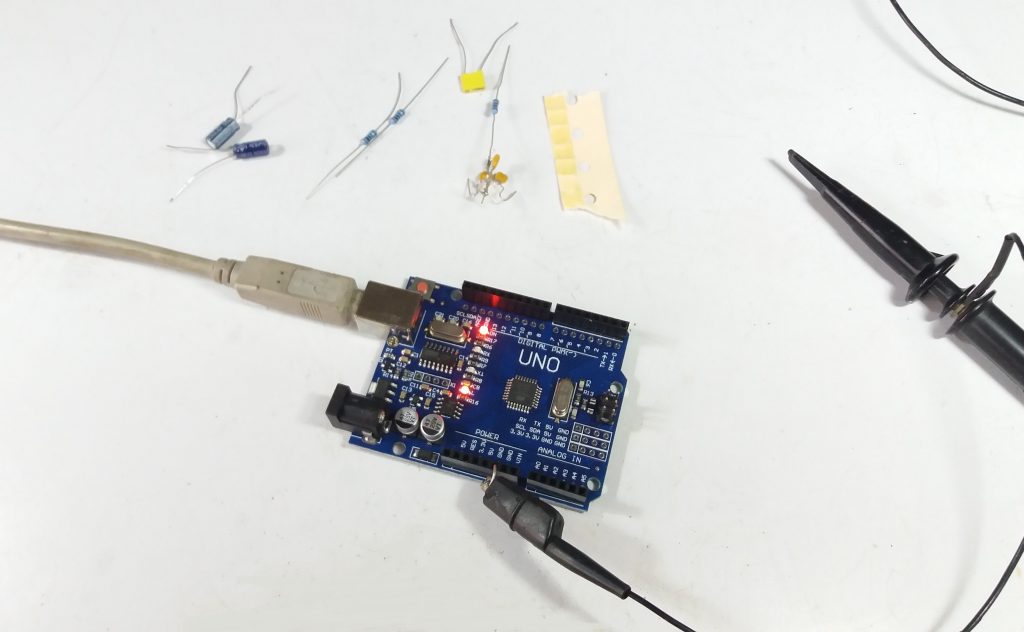
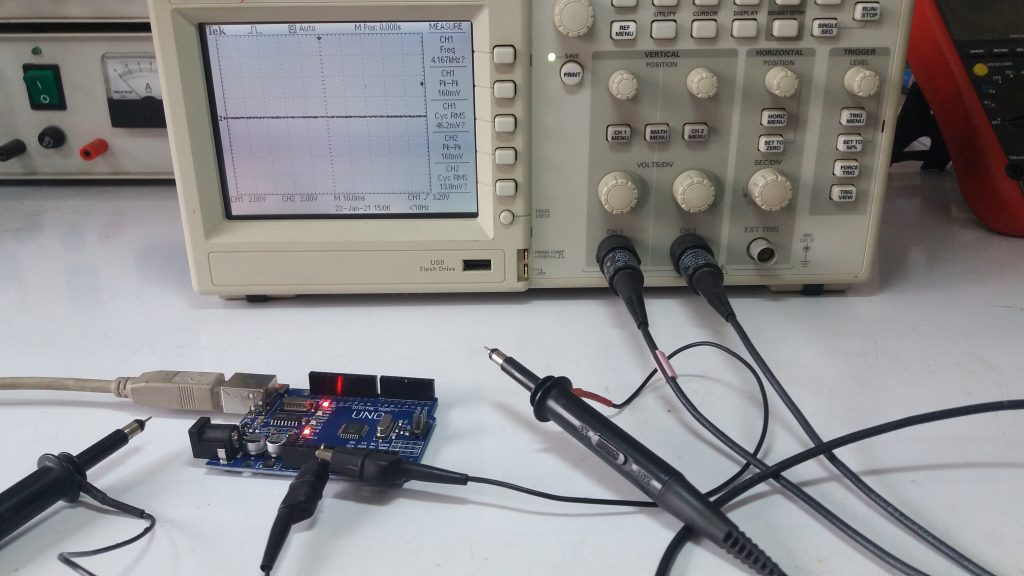
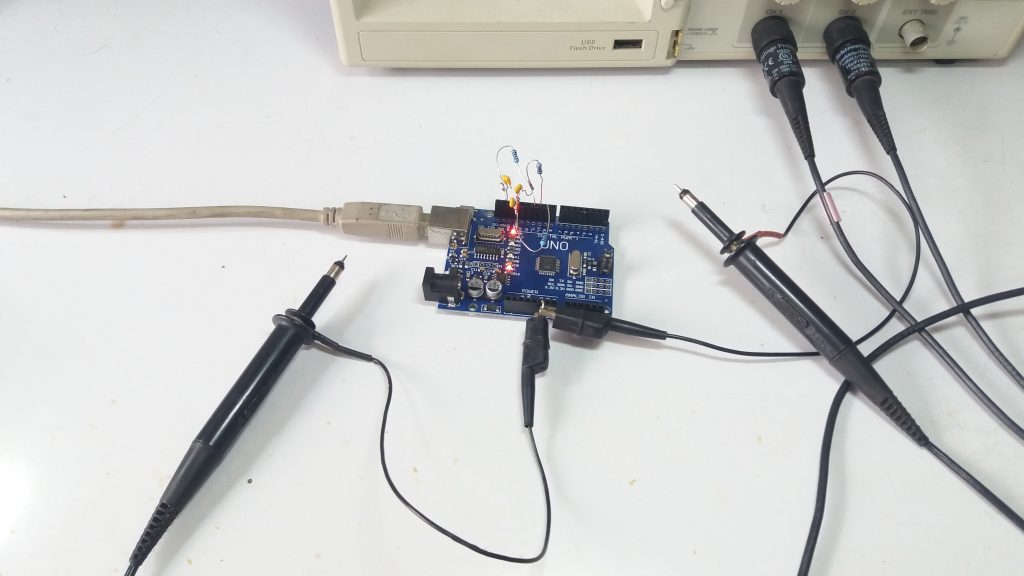
รูปที่ 1 เป็นการเตรียมอุปกรณ์ที่จะใช้ในการทดลองต่างๆ ซึ่งในรูปประกอบด้วยบอร์ดควบคุมไมโครคอนโทรลเลอร์ Arduino UNO, ตัวต้านทาน 2 กิโลโอห์ม 3 ตัว, ตัวเก็บประจุขนาด 100 นาโนฟารัด 3 ตัว และเครื่องมือวัดสัญญาณด้วยออสซิลโลสโคป 1 เครื่อง
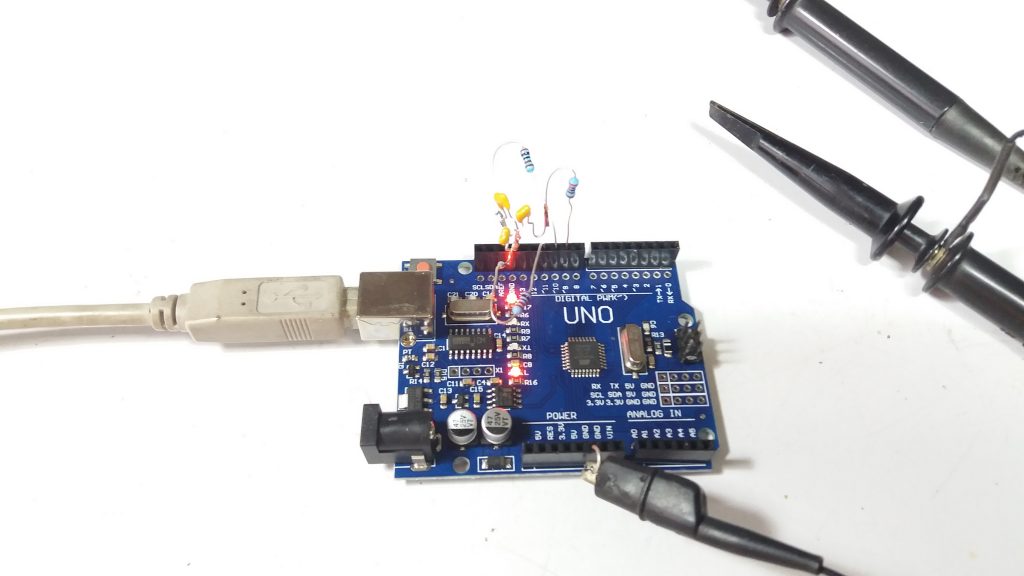
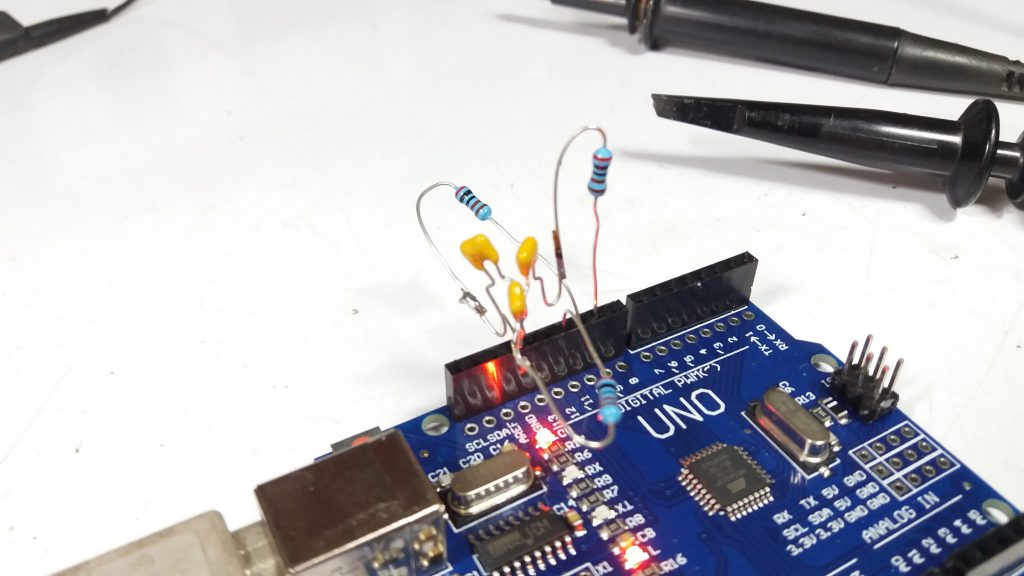
รูปที่ 2 และ 3 การต่อทดลองต่อการต่อวงจรกรองความถี่ต่ำผ่านที่ขา 9, ขา 10 และขา 11 สำหรับใช้ในการทดลอง ซึ่งในที่นี้จะต่อที่คอนเน็กเตอร์ของบอร์ดควบคุม Arduino UNO เลย ทั้งนี้ใช้อุปกรณ์ไม่มากและเพื่อให้ง่ายสำหรับทดลองได้รวดเร็วขึ้น
รูปที่ 4 เตรียมเออสซิลโลสโคปสำหรับวัดสัญญาณจากการโปรแกรมคำสั่งให้กับบอร์ดควบคุม Arduino UNO
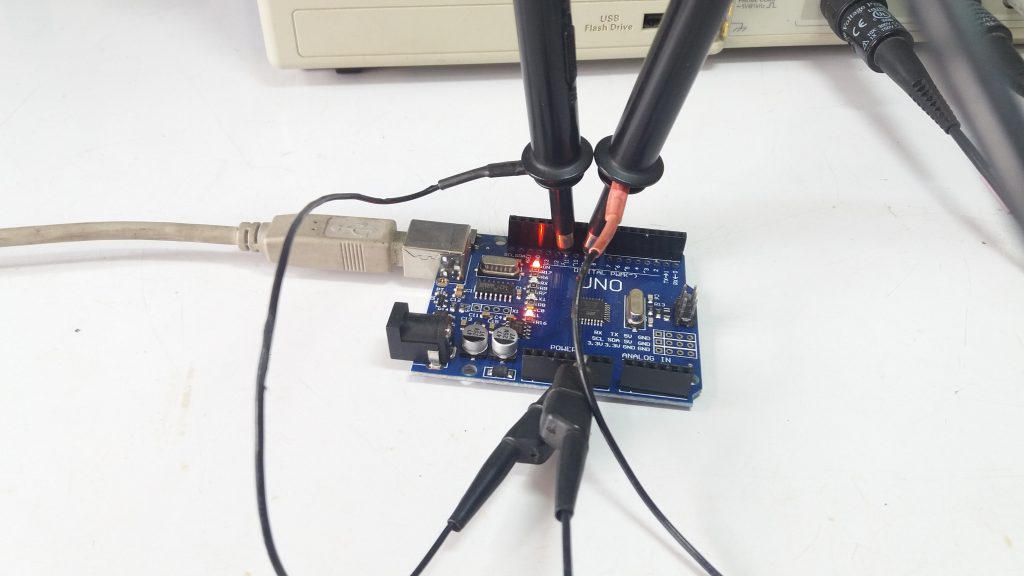
รูปที่ 5 แสดงลักษณะของการวัดสัญญาณบอร์ดควบคุม Arduino UNO ที่ขา 9, ขา 10 และขา 11 จากนั้นเราจะสังเกตสัญญาณที่เกิดขึ้นในแต่ละช่อง และข้างล่างนี้จะเป็นโปรแกรมที่ใช้ในการทดลองซึ่งคุณ Martin Nawrath ได้แชร์ไว้ให้สำหรับนำไปพัฒนาและทดลองต่อไป
*** โปรแกรมใช้ในการทดลองจาก https://github.com/cmasenas/3-Phase-Sine-Arduino/blob/Release/DDS_Generator.ino [3]
// 3 phase PWM sine
// (c) 2016 C. Masenas
// Modified from original DDS from:
// KHM 2009 / Martin Nawrath
// table of 256 sine values / one sine period / stored in flash memory
// https://github.com/cmasenas/3-Phase-Sine-Arduino/blob/Release/DDS_Generator.ino
PROGMEM const unsigned char sine256[] = {
127,130,133,136,139,143,146,149,152,155,158,161,164,167,170,173,176,178,181,184,187,190,192,195,198,200,203,205,208,210,212,215,217,219,221,223,225,227,229,231,233,234,236,238,239,240,
242,243,244,245,247,248,249,249,250,251,252,252,253,253,253,254,254,254,254,254,254,254,253,253,253,252,252,251,250,249,249,248,247,245,244,243,242,240,239,238,236,234,233,231,229,227,225,223,
221,219,217,215,212,210,208,205,203,200,198,195,192,190,187,184,181,178,176,173,170,167,164,161,158,155,152,149,146,143,139,136,133,130,127,124,121,118,115,111,108,105,102,99,96,93,90,87,84,81,78,
76,73,70,67,64,62,59,56,54,51,49,46,44,42,39,37,35,33,31,29,27,25,23,21,20,18,16,15,14,12,11,10,9,7,6,5,5,4,3,2,2,1,1,1,0,0,0,0,0,0,0,1,1,1,2,2,3,4,5,5,6,7,9,10,11,12,14,15,16,18,20,21,23,25,27,29,31,
33,35,37,39,42,44,46,49,51,54,56,59,62,64,67,70,73,76,78,81,84,87,90,93,96,99,102,105,108,111,115,118,121,124
};
#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit))
#define sbi(sfr, bit) (_SFR_BYTE(sfr) |= _BV(bit))
int testPin = 7;
int enablePin = 6 ;
volatile float freq=1;
const float refclk=122.549 ; // 16 MHz/510/256
// variables used inside interrupt service declared as voilatile
volatile unsigned long sigma; // phase accumulator
volatile unsigned long delta; // phase increment
byte phase0, phase1, phase2 ;
void setup()
{
Serial.begin(9600); // connect to the serial port
Serial.println("DDS Test");
pinMode(enablePin, OUTPUT); // sets the digital pin as output
pinMode(testPin, OUTPUT); // sets the digital pin as output
pinMode(9, OUTPUT); // pin9= PWM output / frequency output
pinMode(10, OUTPUT); // pin10= PWM output / frequency output
pinMode(11, OUTPUT); // pin11= PWM output / frequency output
Setup_timer2();
Setup_timer1();
digitalWrite(enablePin, HIGH);
// the waveform index is the highest 8 bits of sigma
// choose refclk as freq to increment the lsb of the 8 highest bits
// for every call to the ISR of timer2 overflow
// the lsb of the 8 highest bits is 1<<24 (1LL<<24 for long integer literal)
delta = (1LL<<24)*freq/refclk ;
}
void loop(){
changeFreq(20);
delay(10000);
changeFreq(25);
delay(10000);
}
void changeFreq(float _freq){
cbi (TIMSK2,TOIE2); // disable timer2 overflow detect
freq = _freq;
delta=(1LL<<24)*freq/refclk; // update phase increment
sbi (TIMSK2,TOIE2); // enable timer2 overflow detect
}
//******************************************************************
// timer2 setup
// set prscaler to 1, fast PWM
void Setup_timer2() {
// Timer2 Clock Prescaler to : 1
sbi (TCCR2B, CS20); // set
cbi (TCCR2B, CS21); // clear
cbi (TCCR2B, CS22);
// Timer2 PWM Mode
cbi (TCCR2A, COM2A0); // clear OC2A on Compare Match, PWM pin 11
sbi (TCCR2A, COM2A1);
// set to fast PWM
sbi (TCCR2A, WGM20); // Mode 1, phase correct PWM
cbi (TCCR2A, WGM21);
cbi (TCCR2B, WGM22);
sbi (TIMSK2,TOIE2); // enable overflow detect
}
// timer1 setup (sets pins 9 and 10)
// set prscaler to 1, PWM mode to phase correct PWM, 16000000/510 = 31372.55 Hz clock
void Setup_timer1() {
// Timer1 Clock Prescaler to : 1
sbi (TCCR1B, CS10);
cbi (TCCR1B, CS11);
cbi (TCCR1B, CS12);
// Timer1 PWM Mode set to Phase Correct PWM
cbi (TCCR1A, COM1A0); // clear OC1A on Compare Match, PWM pin 9
sbi (TCCR1A, COM1A1);
cbi (TCCR1A, COM1B0); // clear OC1B on Compare Match, PWM pin 10
sbi (TCCR1A, COM1B1);
sbi (TCCR1A, WGM10); // Mode 1 / phase correct PWM
cbi (TCCR1A, WGM11);
cbi (TCCR1B, WGM12);
cbi (TCCR1B, WGM13);
}
//******************************************************************
// Timer2 Interrupt Service at 31372,550 KHz = 32uSec
// this is the timebase REFCLOCK for the DDS generator
// runtime : 8 microseconds ( inclusive push and pop)
// OC2A - pin 11
// OC1B - pin 10
// OC1A - pin 9
// https://www.arduino.cc/en/Tutorial/SecretsOfArduinoPWM
ISR(TIMER2_OVF_vect) {
sbi(PORTD,testPin);
sigma=sigma+delta; // soft DDS, phase accu with 32 bits
phase0=sigma >> 24; // use upper 8 bits for phase accu as frequency information
// read value fron ROM sine table and send to PWM DAC
phase1 = phase0 +85 ;
phase2 = phase0 +170 ;
OCR2A=pgm_read_byte_near(sine256 + phase0); // pwm pin 11
OCR1B=pgm_read_byte_near(sine256 + phase1); // pwm pin 10
OCR1A=pgm_read_byte_near(sine256 + phase2); // pwm pin 9
cbi(PORTD,testPin);
}
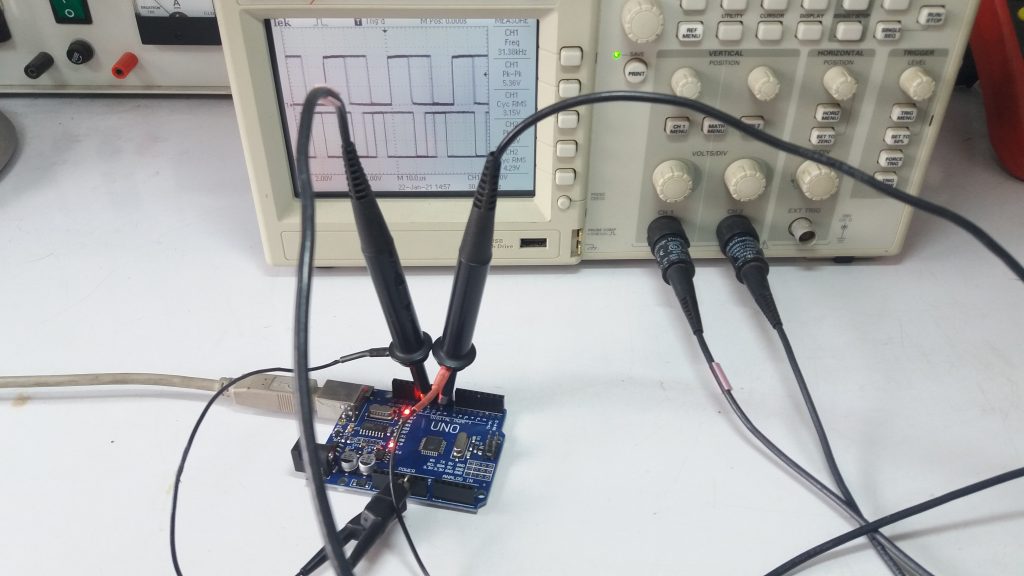
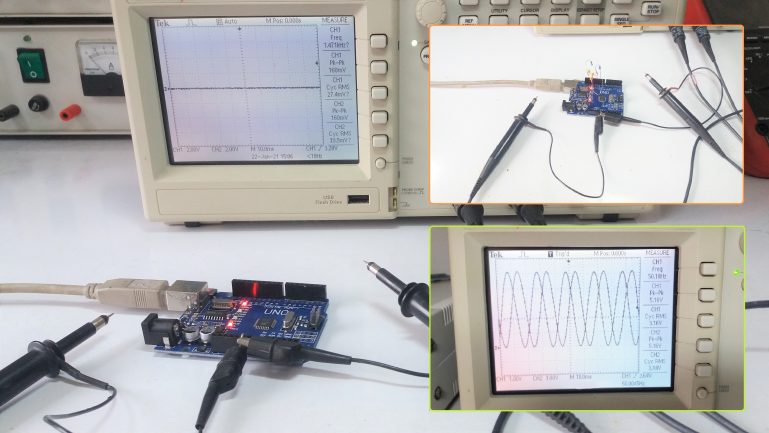
รูปที่ 6 สัญญาณที่เกิดขึ้นในรูปแบบของ SPWM โดยสัญญาณจะเกิดขึ้นทั้ง 3 ช่อง จากขา D9, D10 และ D11 โดยทั้ง 3 ช่องจะเลื่อนเฟสจากกัน 120 องศา (Shift phase 120 degrees)
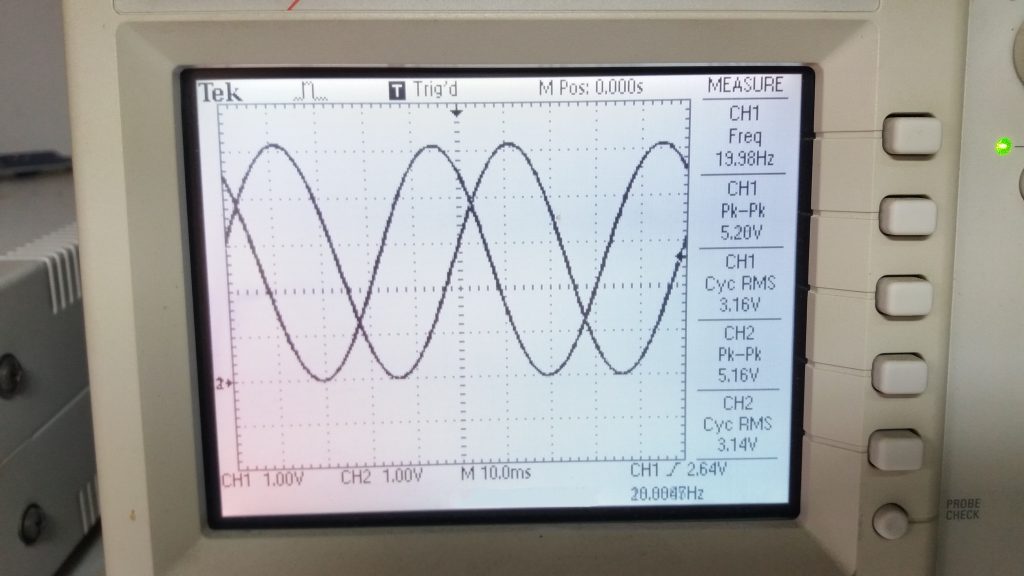
รูปที่ 9 แสดงลักษณะของสัญญาณไซน์เวฟที่เกิดขึ้นจากการต่อวงจรกรองความถี่ต่ำผ่าน จะสังเกตเห็นว่าสัญญาณจะคล้ายในทฤษฏีต่างๆ ที่อธิบายไว้ โดยในการทดลองนี้จะวัดสัญญาณเปรียบเทียบกันทั้ง 3 ช่องสำหรับตรวจสอบสัญาณที่เกิดขึ้นอีกครั้ง
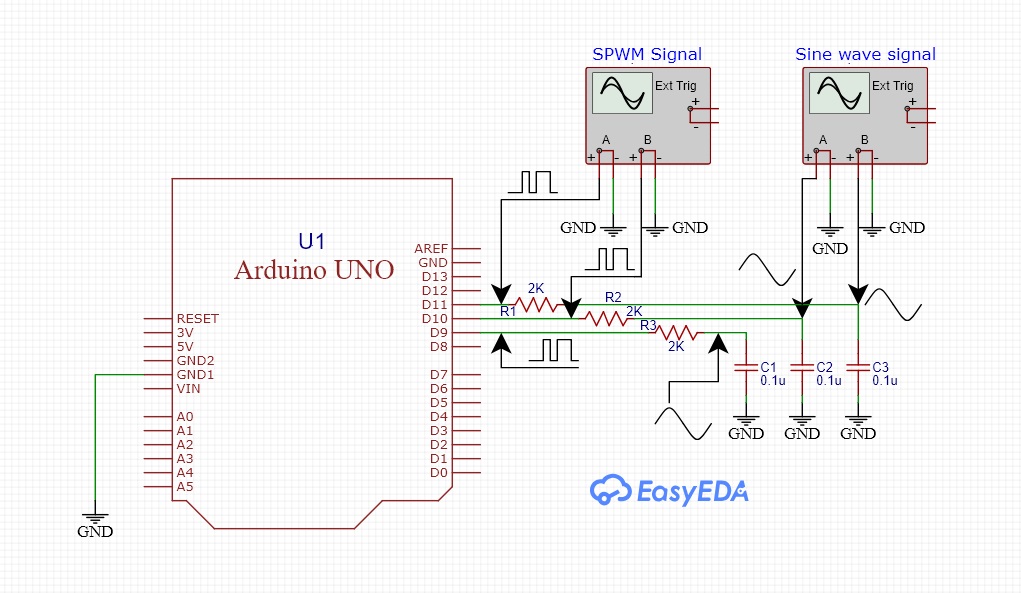
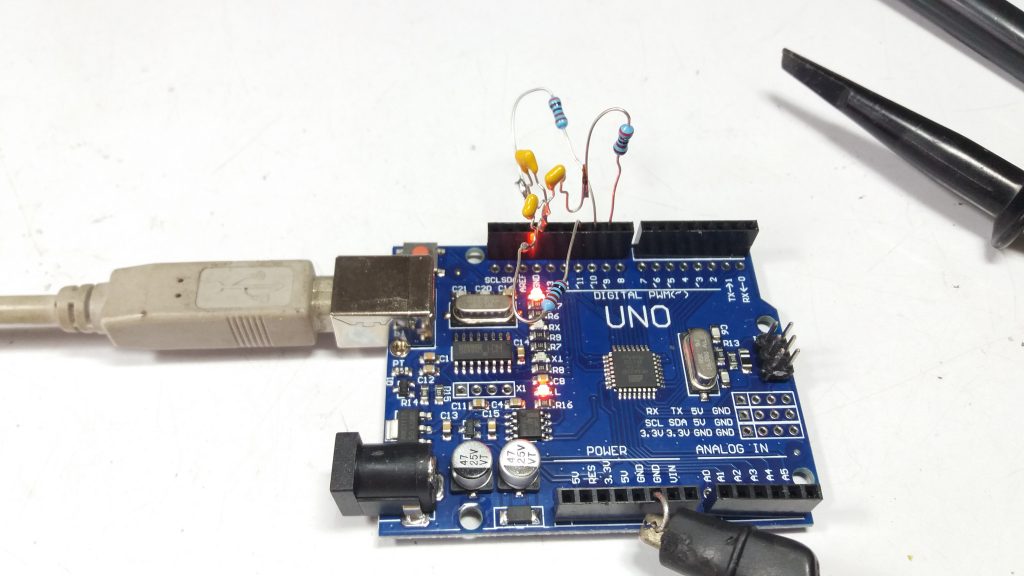
รูปที่ 10 เป็นวงจรที่ใช้ในการทดลองเบื้องต้นสำหรับโครงงานนี้ โดยจะสังเกตเห็นว่าส่วนที่วัดสัญญาณ SPWM จะเป็นตำแหน่งที่ขา D9, D10 และ D11 และส่วนของสัญญาณไซน์เวฟที่เกิดขึ้นจะวัดสัญญาณที่ผ่านวงจรกรองสัญญาณความถี่ต่ำผ่านแล้วหรือบนตัวเก็บประจุ C1, C2 และ C3 นั้นเองครับ
สำหรับการทดลองนี้ เป็นการทดลองเบื้องต้นในการสร้างสัญญาณไซน์เวฟ 3 ช่องจากบอร์ดควบคุม Arduino UNO ซึ่งคุณ Martin Nawrath ได้แชร์ไว้และต้องขอขอบคุณ ท่านมา ณ ที่นี้ด้วยครับ ในส่วนการทดลองต่อไปจะเป็นการทดลองพัฒนาโปรแกรมนี้ให้สามารถปรับความถี่สำหรับการควบคุมแบบ V/f control (Volts per Hertz) รวมทั้งสามารถเชื่อมต่อกับเพาเวอร์โมดูล (Intelligent Power Module : IPM) สำหรับขับมอเตอร์ 3 เฟส แบบอินดักชั่น กันต่อครับ.
Reference
- https://electronics-project-hub.com/3-phase-sine-wave-generator-code-arduino
- https://forum.arduino.cc/index.php?topic=236778.0
- https://github.com/cmasenas/3-Phase-Sine-Arduino/blob/Release/DDS_Generator.ino
- https://forum.arduino.cc/index.php?topic=121727.0
- http://interface.khm.de/index.php/lab/interfaces-advanced/arduino-dds-sinewave-generator/index.html
- http://www.berryjam.eu/2015/04/driving-bldc-gimbals-at-super-slow-speeds-with-arduino
- https://www.infineon.com/dgdl/AP1609710_different_PWM_for_three_phase_ACIM.pdf?fileId=db3a304412b407950112b40a1bf20453
- https://github.com/carneeki/OpenVFD/blob/master/software/OpenVFD.ino