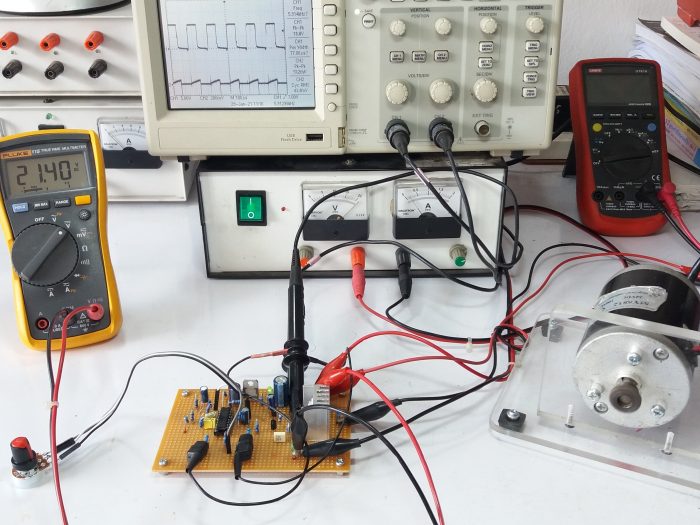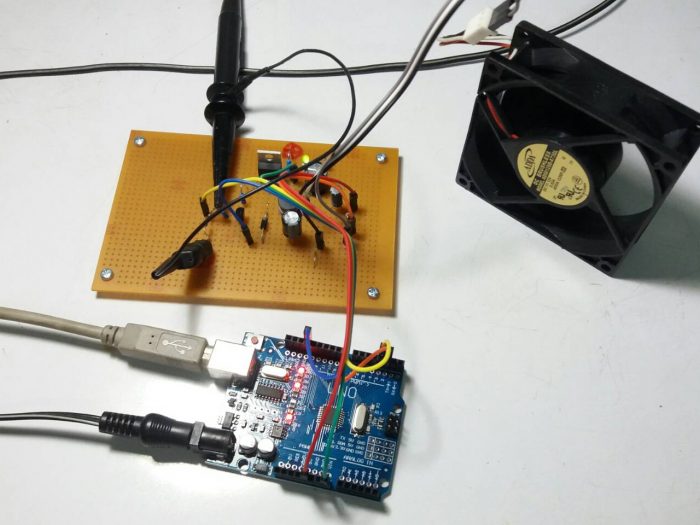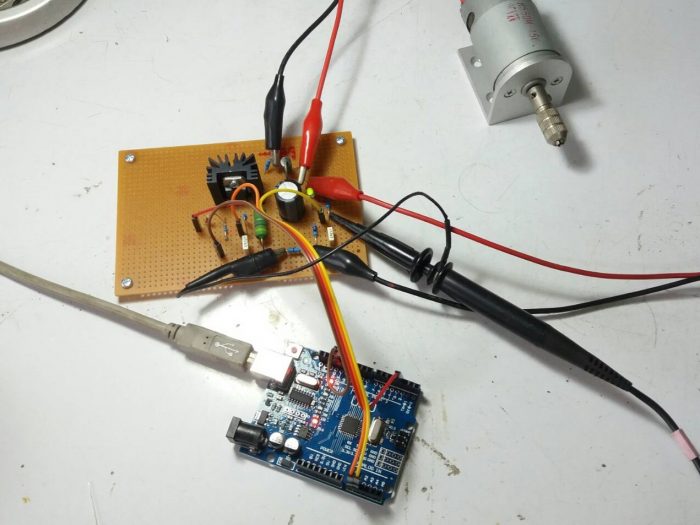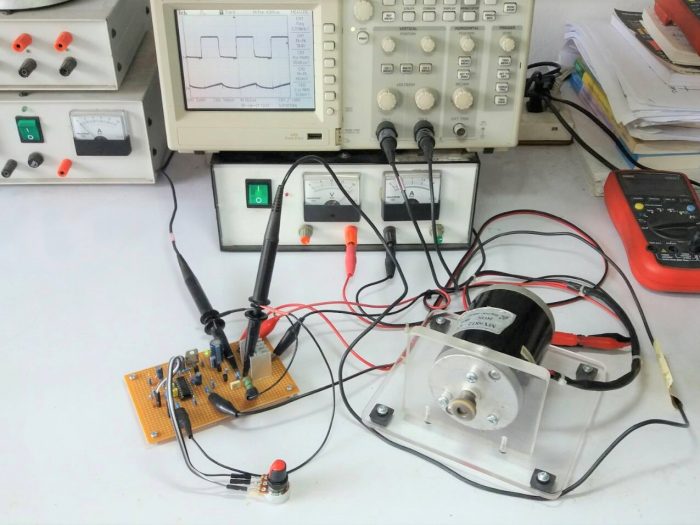
โครงงานนี้เป็นการพัฒนาต่อเนื่อง สำหรับการควบคุมมอเตอร์กระแสตรงด้วยไอซีเบอร์ TL494 ซึ่งในเวอร์ชั่น 2 นี้จะเป็นการปรับปรุงจากเวอร์ชั่น 1 ให้สามารถควบคุมความเร็วรอบแบบปิด ด้วยการรับสัญญาณป้อนกลับจากตัวมอเตอร์ (Process Value : PV) เข้ามาควบคุมด้วยออปแอมป์ และค่ากำหนดความเร็ว (Set Point : SP)