
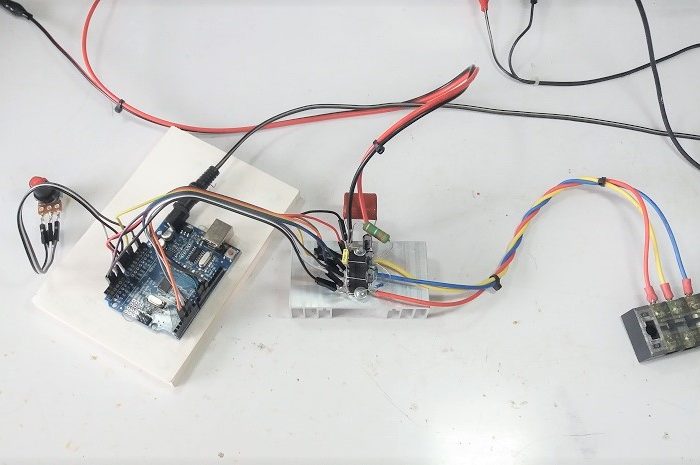
การทดลองนำโรตารี่เอ็นโค้ดเดอร์ (Rotary Encoder) ของ OMRON มาเชื่อมต่อกับ Arduino UNO เพื่อตรวจจับความเร็วและทิศทางการหมุนที่เกิดขึ้น
Electrical and Electronics Learn Everyday
การทดลองนำโรตารี่เอ็นโค้ดเดอร์ (Rotary Encoder) ของ OMRON มาเชื่อมต่อกับ Arduino UNO เพื่อตรวจจับความเร็วและทิศทางการหมุนที่เกิดขึ้น
โครงงานนี้จะเป็นการใช้บอร์ดควบคุม Arduino UNO สำหรับสร้างสัญญาณพัลซ์วิดธ์มอดูเลต ให้กับสวิตชิ่งเพาเวอร์ซัพพลายแบบฮาร์ฟบริดจ์อีกหนึ่งแบบครับ.
การสร้างวงจร DC-DC Synchronous buck converter ขนาด 60 วัตต์ โดยใช้ไอซี UC3842 และ IR2111 ในการควบคุม ซึ่งจะทำงานแบบโหมดกระแส (Current Mode)
สำหรับในตอนสุดท้ายเป็นการประกอบส่วนของการขับกำลังฮาร์ฟบริดจ์สวิตชิ่ง, การพันหม้อแปลงความถี่สูง, วงจรทางด้านเอาต์พุตรวมทั้งการทดลองการทำงานในสุดท้าย
โครงงานนี้เป็นการนำไอซี IR2153 มาใช้ในการควบคุมวงจรสวิตชิ่งเพาเวอร์ซัพพลาย (Switching Power Supply) แบบฮาร์ฟบริดจ์ (Half-Bridge Topology) ที่ใช้วงจรพื้นฐานทั่วไปครับ.
โครงงานต้นแบบขนาดเล็กกับการขับมอเตอร์ 3 เฟสด้วย Intelligent Power Modules (IPM) เบอร์ IM231L6T2BAKMA1 ด้วยบอร์ดควบคุม Arduino UNO
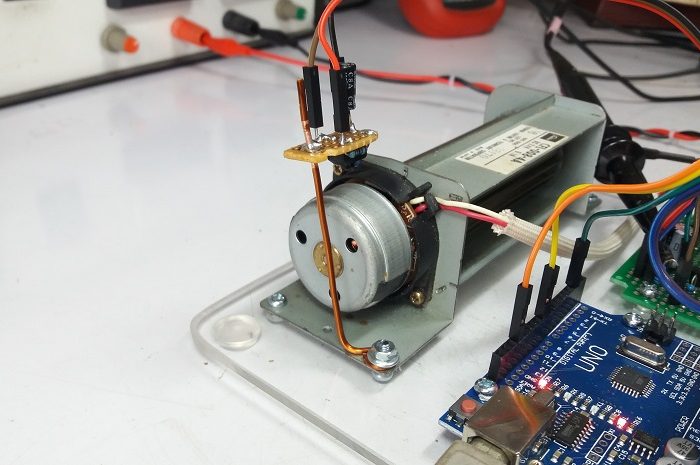
สำหรับโครงงานนี้เป็นการพัฒนาต่อจากโครงงานชุดฝึกการควบคุมความเร็วมอเตอร์ที่ผ่านมา โดยการสร้างวงจรการตรวจจับความเร็วรอบให้กับมอเตอร์กันต่อครับ.