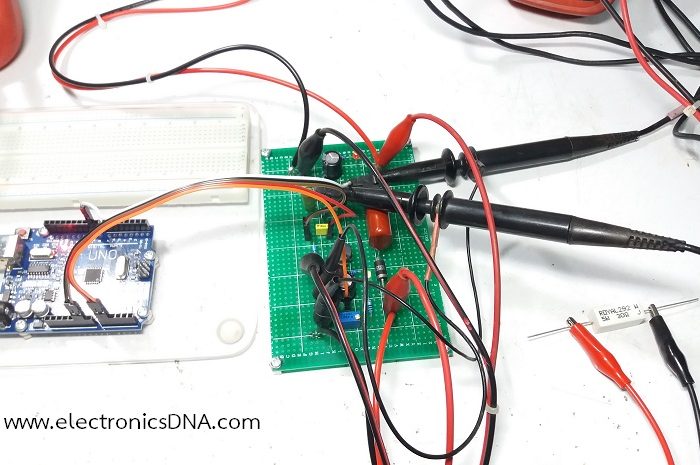
โครงงานนี้เป็นวงจรดีซี ทู ดีซี คอนเวอร์เตอร์ขนาดเล็กที่เรียกว่าเซปิก คอนเวอร์เตอร์ (SEPIC Converter) ซึ่งมีหลักการทำงานที่น่าสนใจอีกแบบหนึ่ง
Electrical and Electronics Learn Everyday
โครงงานนี้เป็นวงจรดีซี ทู ดีซี คอนเวอร์เตอร์ขนาดเล็กที่เรียกว่าเซปิก คอนเวอร์เตอร์ (SEPIC Converter) ซึ่งมีหลักการทำงานที่น่าสนใจอีกแบบหนึ่ง
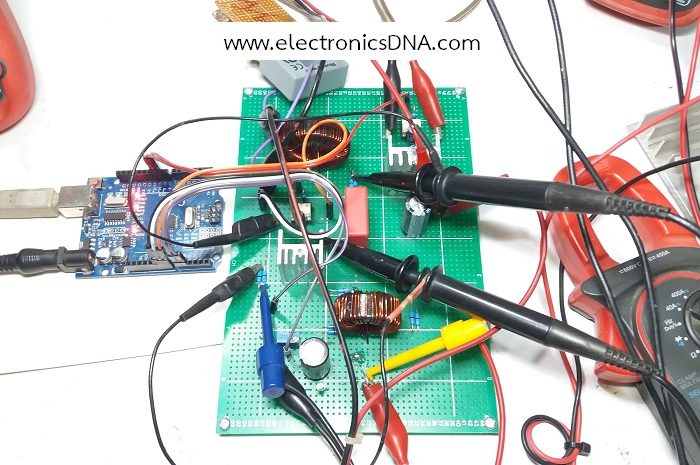
สำหรับโคงงานนี้เป็นการพัฒนาวงจรซีต้าคอนเวอร์เตอร์ (ZETA Converter) ให้ทำงานแบบซิงโครนัส ซึ่งจะช่วยให้วงจรทำงานได้มีประสิทธิภาพมากขึ้น

โครงงานการทดลองคอนเวอร์เตอร์ขนาดเล็กแบบซีต้า ซึ่งเป็นคอนเวอร์เตอร์ที่มีลักษณะของการทำงานที่น่าสนใจและวงจรการทำงานไม่ซับซ้อนมากนักครับ.
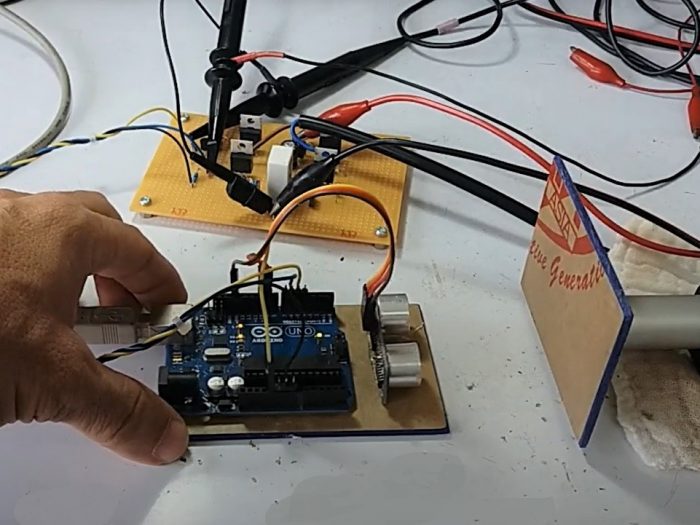
การทดลองควบคุม Linear Actuator โดยใช้บอร์ด Arduino UNO และใช้วงจรกลับทิศทางการหมุนมอเตอร์แบบ H-Bridge ด้วยเพาเวอร์มอสเฟตชนิด N และ P แชนแนล.
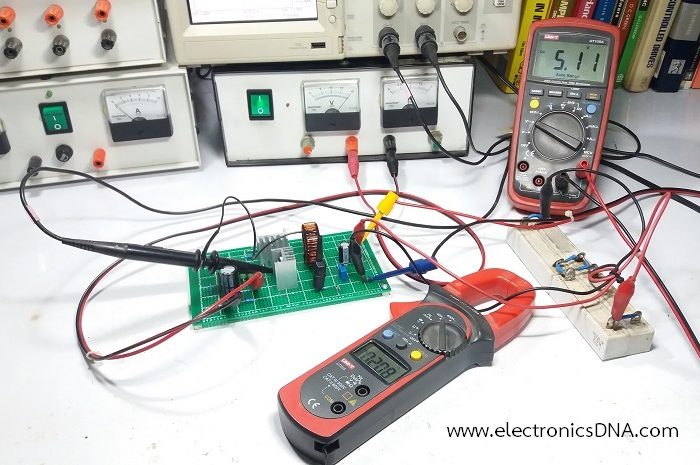
ในตอนจบนี้จะเป็นการนำวงจรที่ทดลองมาต่อบนบอร์ดอเนกประสงค์ สำหรับตรวจสอบการทำงาน รวมถึงการปรับแต่งวงจรการทำงานเพื่่อนำไปใช้งานจริงต่อไป.
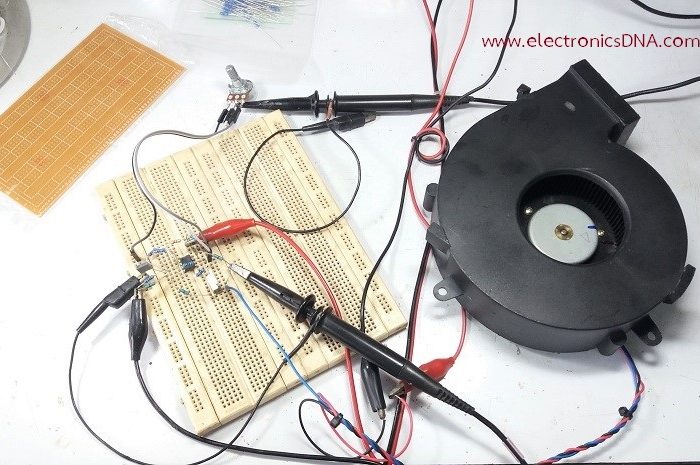
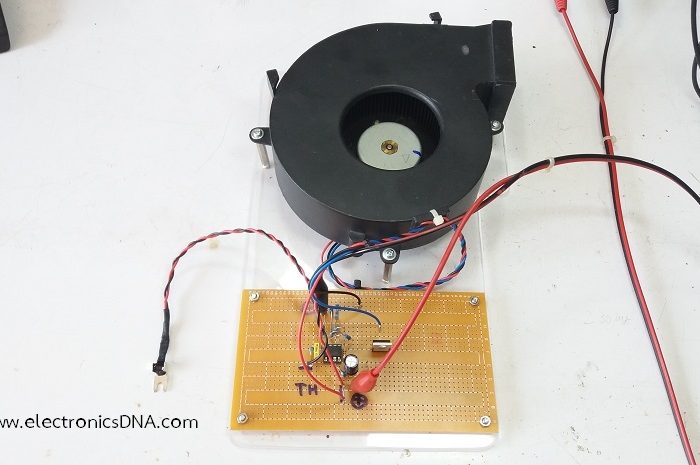
สำหรับโครงงานนี้เป็นการควบคุมความเร็วมอเตอร์พัดลมกระแสตรง (DC Motor) โดยใช้ออปแอมป์ LM393 และรับสัญญาณปรับความเร็วด้วยเทอร์มิสเตอร์ตรวจจับอุณหภูมิ
โครงงานนี้เป็นการนำไอซี MC34063A มาควบคุมวงจรบักคอนเวอร์เตอร์ ขนาด 20 วัตต์ ซึ่งเป็นโครงงานต่อเนื่องจากวงจรบูทคอนเวอร์เตอร์ที่นำเสนอมาแล้วครับ.