ในตอนสุดท้ายสำหรับการเคลื่อนที่รูปตัว S (S-curve Motion Profile) เป็นตัวอย่างการเคลื่อนที่ของมอเตอร์แบบต่อเนื่องในทิศทางเดียวและสองทิศทาง
Electrical and Electronics Learn Everyday
ในตอนสุดท้ายสำหรับการเคลื่อนที่รูปตัว S (S-curve Motion Profile) เป็นตัวอย่างการเคลื่อนที่ของมอเตอร์แบบต่อเนื่องในทิศทางเดียวและสองทิศทาง

บทความนี้เป็นการเรียนรู้เกี่ยวกับการเคลื่อนที่รูปตัว S (S-curve Motion Profile) ซึ่งเป็นเทคนิคที่ใช้ในการควบคุมการเคลื่อนที่ของมอเตอร์ต่างๆ
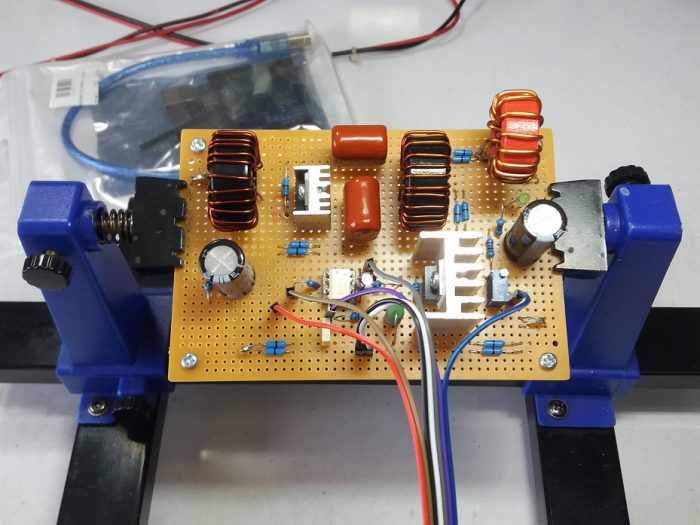
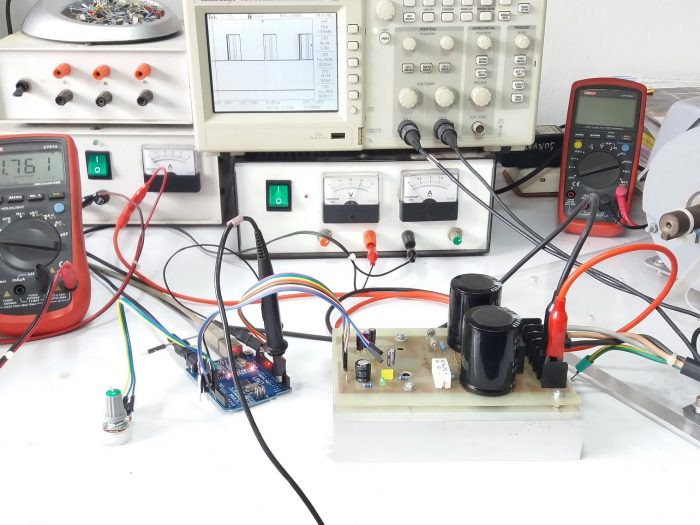
ทดลองกันต่อกับ Quasi-Z-source Inverter แบบเบื้องต้น โดยกำหนดช่วงเวลา Non-Shoot through state และ Shoot through state ด้วยเพาเวอร์มอสเฟตครับ.
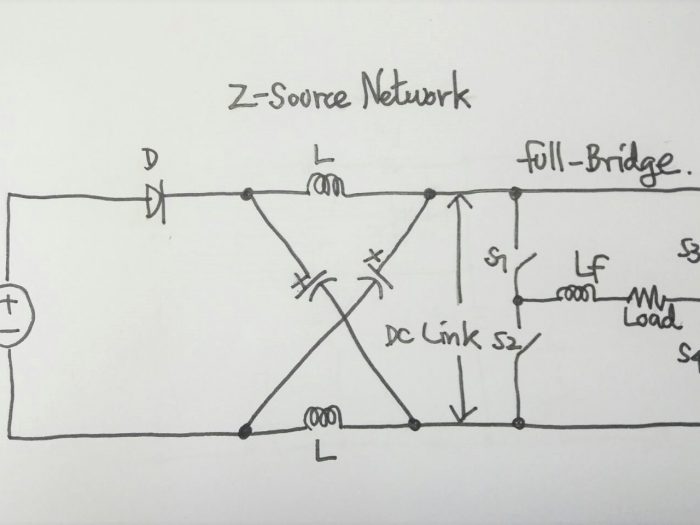
บทความนี้นำเสนอวงจรอินเวอร์เตอร์อีกรูปแบบหนึ่ง ซึ่งเราอาจจะยังไม่เคยมากนัก ส่วนการทำงานและใช้เทคนิดเป็นอย่างไรลองติดตามเนื้อหากันต่อนะครับ
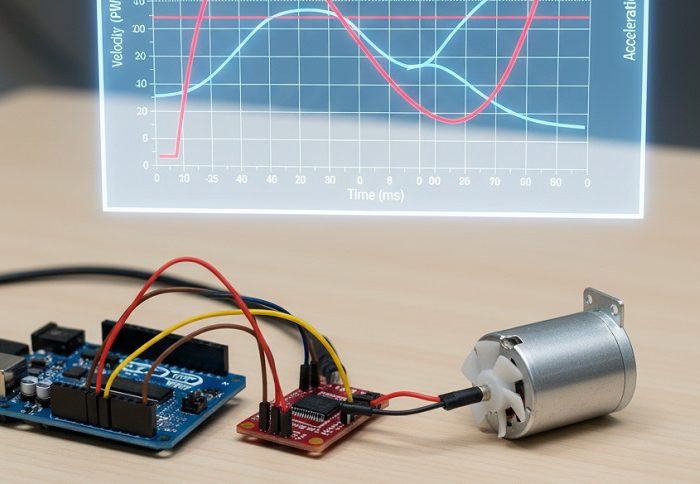
บทความนี้เป็นการยกตัวอย่างโค้ดโปรแกรมจากเว็บไซต์ต่างประเทศ ในการทดลองเกี่ยวกับการขับมอเตอร์ 3 เฟส ด้วยวิธีการ Space Vector Pulse Width Modulation (SVPWM) โดยใช้บอร์ด Arduino UNO ครับ.
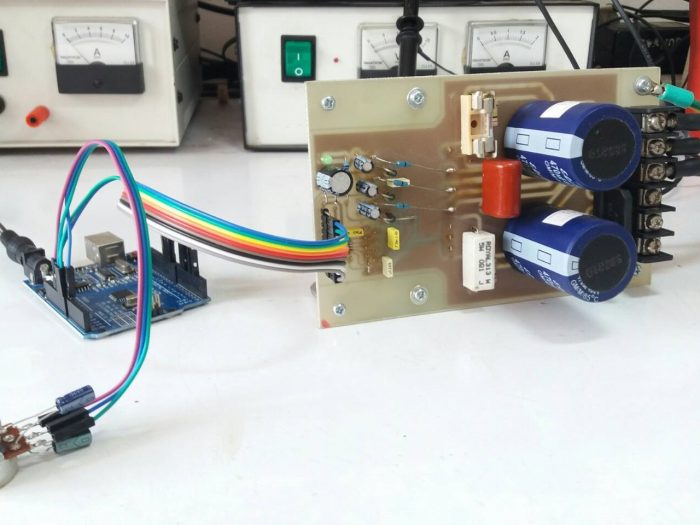
โครงงานบอร์ดทดลองสำหรับขับมอเตอร์ 3 เฟส เช่น มอเตอร์กระแสตรงแบบไม่ใช้แปรงถ่าน (BLDC Motor) หรือมอเตอร์ 3 เฟสแบบอินดักชั่น (3 Phase Induction Motor) ซึ่งจะช่วยให้เราสะดวกกับการทดลองมอเตอร์มากขึ้น
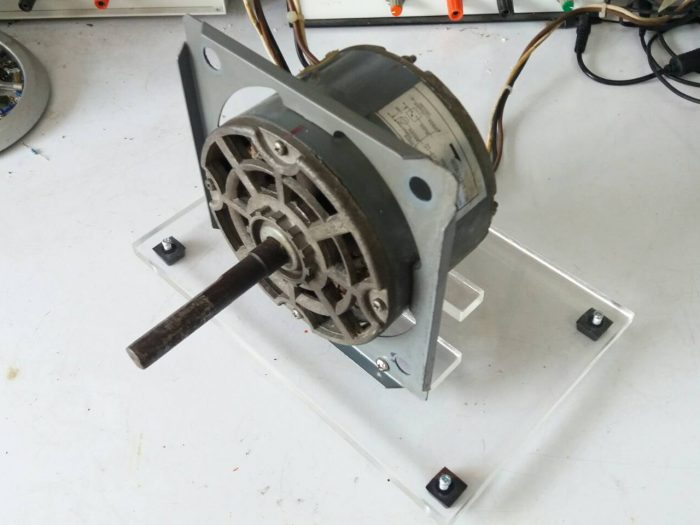
โครงงานนี้เป็นการทำแท่นยึดให้กับมอเตอร์ไฟฟ้า 220Vac ชนิด Capacitor Run Motor เพื่อใช้ในการทดลองและศึกษาการทำงานของมอเตอร์ชนิดนี้ รวมทั้งค่าพารามิเตอร์ต่างๆ ที่จะเกิดขึ้นเมื่อเราต้องการควบคุมความเร็ว (Speed control) และแรงบิด (Torque Control)