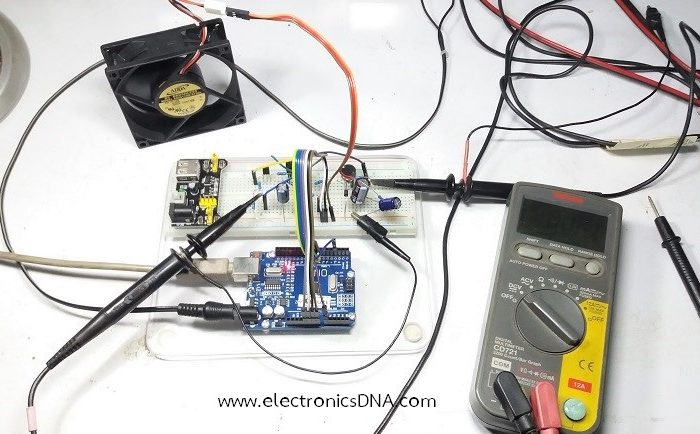
โครงงานนี้เป็นการทดลองและเรียนรู้เบื้องต้น กับการควบคุม PID Adaptive Tuning โดยการปรับความเร็วรอบของพัดลมขนาดเล็กเพื่อสังเกตการทำงานของระบบ
Electrical and Electronics Learn Everyday
โครงงานนี้เป็นการทดลองและเรียนรู้เบื้องต้น กับการควบคุม PID Adaptive Tuning โดยการปรับความเร็วรอบของพัดลมขนาดเล็กเพื่อสังเกตการทำงานของระบบ
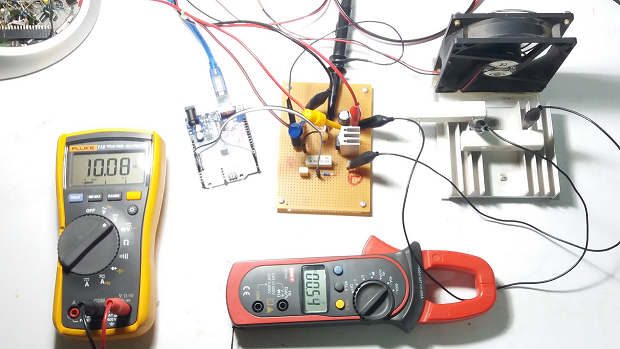
โครงงานนี้เป็นการทดลองเบื้องต้น สำหรับควบคุมแบบปิดด้วย PID Control ด้วยการควบคุมกระแสให้คงที่ โดยใช้ตัวควบคุม Arduino UNO รับสัญญาณป้อนกลับแบบอะนาลอก (ขา A0) และส่งสัญาณปรับค่ากระแสแบบ PWM (ขา D3)
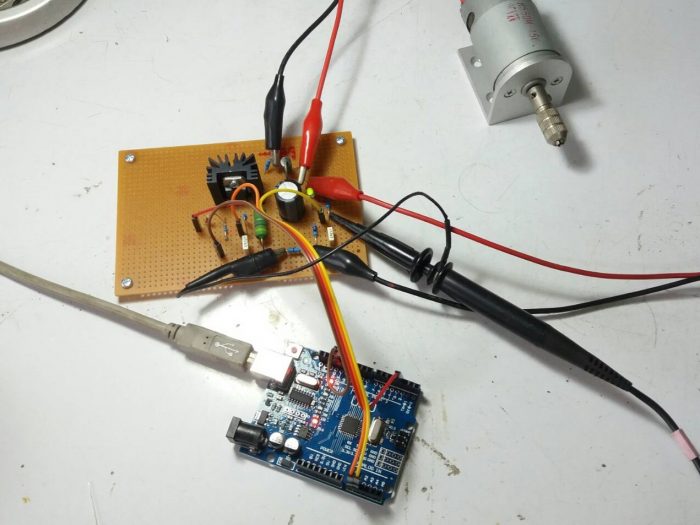
การควบคุมความเร็วมอเตอร์กระแสตรง (DC Motor) โดยใช้สัญญาณค่าแรงดันย้อนกลับ (Back-EMF) ของตัวมอเตอร์ในการป้อนกลับ (Feedback) เพื่อให้เราสามารถควบคุมความเร็วได้คงที่
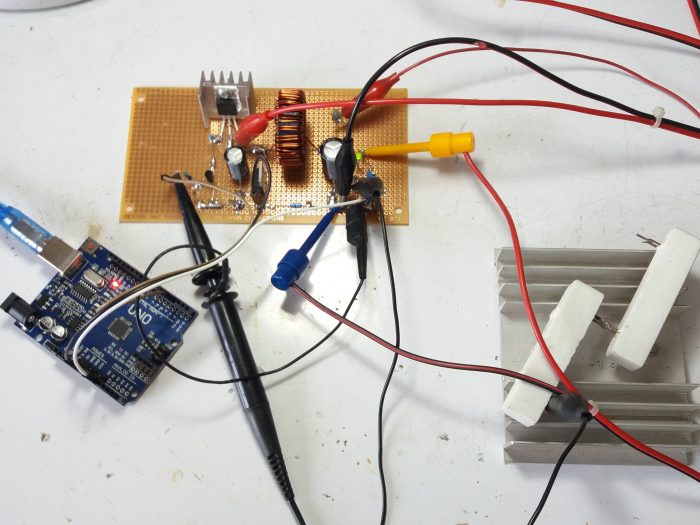
วงจรบักคอนเวอร์เตอร์แบบสวิตชิ่ง (Switching Buck Converter) ควบคุมด้วยไมโครคอนโทรลเลอร์ Arduino UNO โปรแกรมควบคุมแบบปิด (Closed-Loop control) ด้วย PID Control