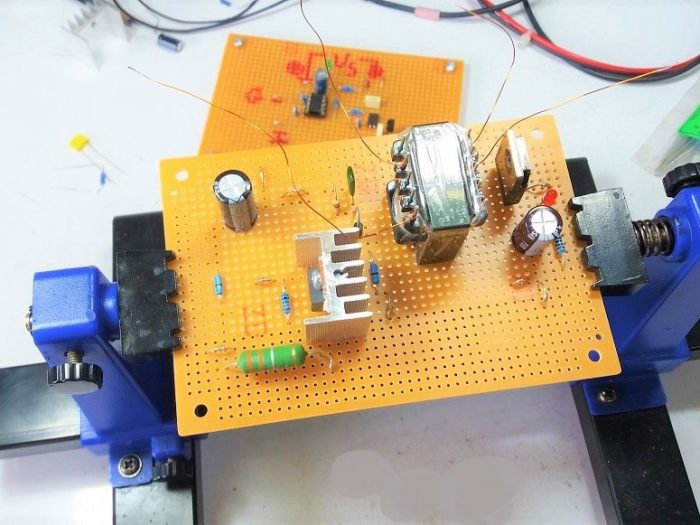
สำหรับการออกแบบแหล่งจ่ายไฟเลี้ยงสวิตชิ่งโหมดขนาดเล็ก ในตอนที่ 2 จะเป็นการพันหม้อแปลงสวิตชิ่ง, การต่อวงจรขับกำลังและภาคเอาต์พุตกันต่อครับ.
Electrical and Electronics Learn Everyday
สำหรับการออกแบบแหล่งจ่ายไฟเลี้ยงสวิตชิ่งโหมดขนาดเล็ก ในตอนที่ 2 จะเป็นการพันหม้อแปลงสวิตชิ่ง, การต่อวงจรขับกำลังและภาคเอาต์พุตกันต่อครับ.
โครงงานนี้เป็นแหล่งจ่ายไฟเลี้ยงขนาดเล็กแบบสวิตชิ่งโหมด ด้วยฟายแบกคอนเวอร์เตอร์ (Flyback converter) โดยใช้ไอซี OB2263 ในการควบคุมการทำงาน
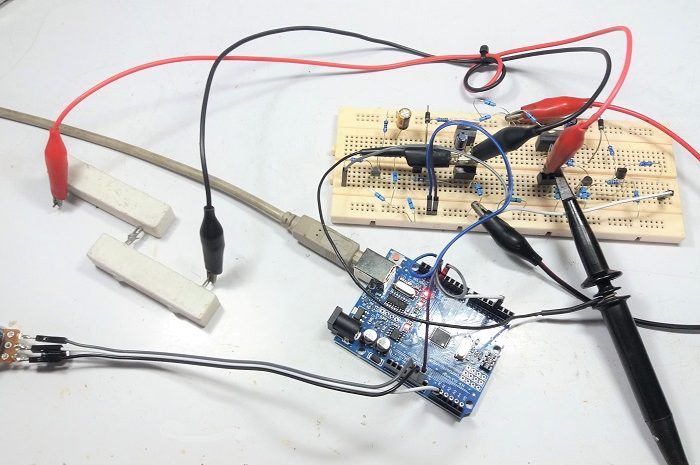
โครงงานนี้เป็นการออกแบบวงจรขับกำลังเอาต์พุตอินเวอร์เตอร์ให้รับแรงดันสูง และสามารถเชื่อมต่อกับบอร์ด Arduino UNO เพื่อควบคุมการทำงานได้ครับ.
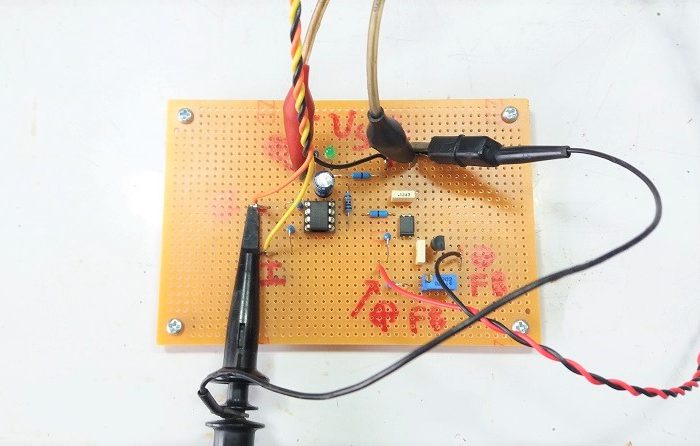
โครงงานดีซี ทู ดีซี ขนาดเล็กโดยใช้ไอซีควบคุมเบอร์ OB2263 ซึ่งเป็นเนื้อหาต่อเนื่อง จากบทความแนะนำไอซีเบอร์นี้เพื่อให้เข้าใจการทำงานเพิ่มขึ้น.
แนะนำไอซีสำหรับวงจรสวิตชิ่งเพาเวอร์ซัพพลายเบอร์ OB2263 ทำงานในโหมดกระแส (Current Mode) ขาต่อใช้งานวงจรน้อยและเป็นอีกเบอร์หนึ่งที่น่าสนใจครับ.
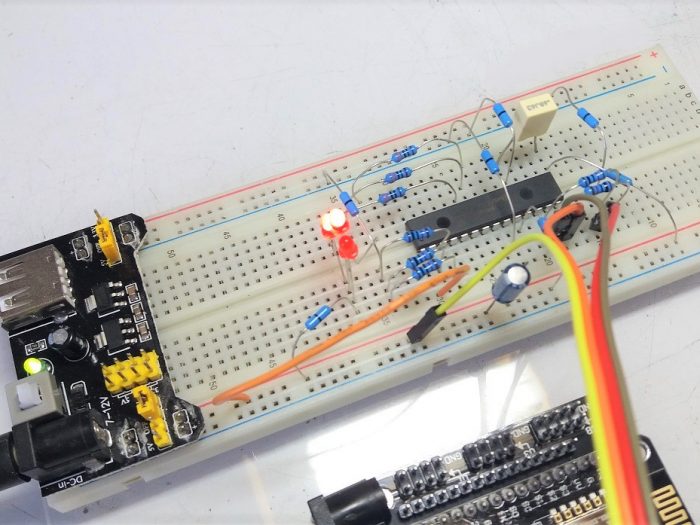
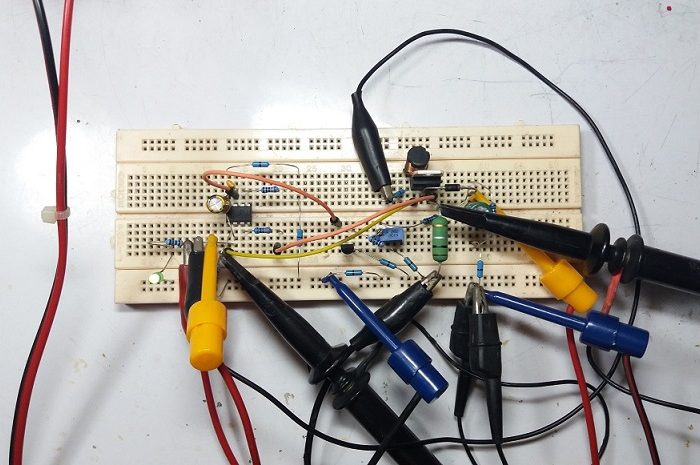
การทดลองเบื้องต้นสำหรับเชื่อมต่อระหว่าง NodeMCU ESP8266 และไอซี MCP23017 เพื่อให้เราสามารถรับสัญญาณอินพุตและเอาต์พุต (I/O) ได้เพิ่มขึ้น
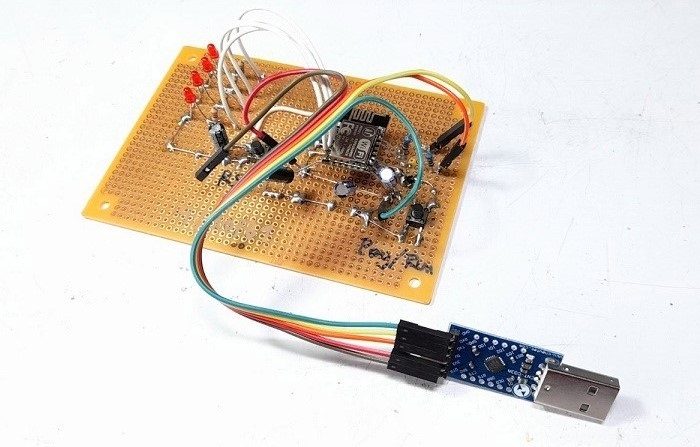
การทดลองเล็กๆ สำหรับเชื่อมต่อระหว่างโมดูล ESP8266 กับบอร์ดแปลงสัญญาณจากพอร์ต USB ให้เป็น RS232 สำหรับโปรแกรมคำสั่งและดีบักเกอร์การทำงานของโปรแกรมครับ.