Servo motor S-Curve Motion Profile Based on Arduino UNO
การทดลองนี้เป็นการควบคุมเซอร์โวมอเตอร์ให้คลื่อนที่แบบ S-Curve Motion Profile โดยใช้บอร์ดควบคุม Arduino UNO เพื่อเป็นการประยุกต์ใช้งานสำหรับการเคลื่อนที่แบบ S-Curve Motion Profile ให้กับเซอร์โวมอเตอร์ ซึ่งก่อนหน้านี้เป็นการนำเนื้อหาเบื้องต้นโดยให้เอาต์พุตเป็นแอลอีดีเพื่อสังเกตการทำงาน สำหรับเนื้อหาในตอนนี้จะเป็นการนำผลลัพธ์ที่ได้มาควบคุมเซอร์โวมอเตอร์แทน เพื่อให้สามารถนำโปรแกรมคำสั่งจากการทดลองไปใช้งานอื่นๆ ได้ง่ายยิ่งขึ้น
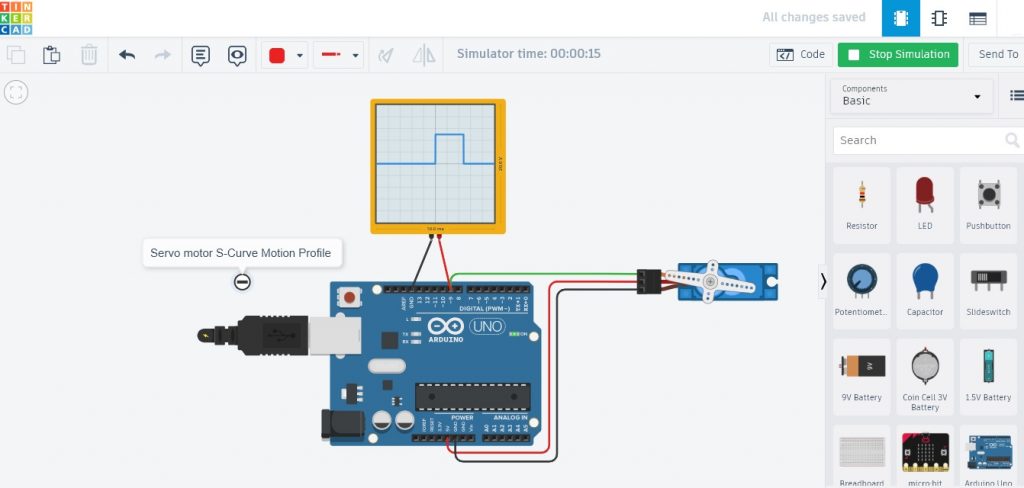
ในรูปที่ 1 แสดงการต่อวงจรสำหรับจำลองการทำงานด้วยโปรแกรม tinkercad.com โดยในรูปจะใช้ขา D9 ในการจ่ายสัญญาณพัลซ์วิดธ์มอดูเลตชั่น สำหรับควบคุมแตำแหน่งการเคลื่อนที่ของเซอร์โวมอเตอร์ จากนั้นจะใช้ออสซิลโลสโคปมาวัดสัญญาณที่ขา D9 เช่นกันเพื่อสังเกตความสัมพันธ์ระหว่างการเคลื่อนที่ของเซอร์โวมอเตอร์กับสัญญาณพัลซ์วิดธ์มอดูเลตชั่น
// Servo motor S-Curve Motion Profile Based on Arduino UNO
#include <Servo.h>
Servo myservo;
// Motor Control Pins
const int pwmPin = 9; // PWM pin
const int pwmLED = 10; // PWM LED
// const int dirPin = 2; // Direction pin
// Motion Parameters
const int V_MAX = 255; // Maximum PWM duty cycle (0-255)
const long ACCEL_TIME = 1500; // Acceleration/Deceleration time in milliseconds (T_a)
const long HOLD_TIME = 2000; // Constant velocity time in milliseconds (T_v)
const long MOVE_DURATION = ACCEL_TIME + HOLD_TIME + ACCEL_TIME; // Total move time
// Time tracking
unsigned long startTime = 0;
bool moveStarted = false;
void setup() {
pinMode(pwmPin, OUTPUT);
pinMode(pwmLED, OUTPUT);
Serial.begin(9600);
myservo.attach(9);
Serial.println("S-Curve PWM Demo Ready. Sending PWM pulses now...");
}
void loop() {
if (!moveStarted) {
// Start the move sequence
// digitalWrite(dirPin, HIGH); // Set Direction
startTime = millis();
moveStarted = true;
}
// --- S-Curve Calculation ---
unsigned long elapsedTime = millis() - startTime;
int currentPWM = 0;
if (elapsedTime <= ACCEL_TIME) {
// Phase 1: Acceleration (Ramp Up)
float ratio = (float)elapsedTime / ACCEL_TIME;
// Sinusoidal ramp from 0 to 1. V(t) will be the integral of a sine wave.
float smoothRatio = 0.5 * (1.0 - cos(ratio * PI));
currentPWM = (int)(V_MAX * smoothRatio);
} else if (elapsedTime <= (ACCEL_TIME + HOLD_TIME)) {
// Phase 2: Constant Velocity (Hold)
currentPWM = V_MAX;
} else if (elapsedTime <= MOVE_DURATION) {
// Phase 3: Deceleration (Ramp Down)
unsigned long timeInDecel = elapsedTime - (ACCEL_TIME + HOLD_TIME);
float ratio = 1.0 - ((float)timeInDecel / ACCEL_TIME);
// Sinusoidal ramp from 1 back to 0.
float smoothRatio = 0.5 * (1.0 - cos(ratio * PI));
currentPWM = (int)(V_MAX * smoothRatio);
} else {
// Move Complete
currentPWM = 0;
moveStarted = false; // Reset for next move
Serial.println("Move Complete. Stopping.");
delay(2000); // Wait 2 seconds before repeating
}
// Apply the calculated PWM value
Serial.print(currentPWM);
Serial.print(", ");
analogWrite(pwmLED, currentPWM);
currentPWM = map(currentPWM, 0, 255, 0, 180);
myservo.write(currentPWM);
Serial.println(currentPWM); // Uncomment to plot the profile
delay(20); // Update speed every 10ms for smooth transitions
}
โปรแกรมควบคุมจะใช้จากบทความ Simple S-Curve Motion Profile Based on Arduino UNO [LEP] และนำมาปรับปรุงเพิ่มเติม สำหรับทดลองให้เซอร์โวมอเตอร์เคลื่อนที่จากตำแหน่ง 0 องศาไปยังตำแหน่ง 180 องศา (Acceleration Phase) จากนั้นให้คงที่ไว้ที่ตำแหน่ง 180 องศาตามที่กำหนด (Constant Speed Phase) เมื่อผ่านช่วงเวลาตำแหน่งคงที่ 180 องศาแล้ว เซอร์โวมอเตอร์จะเคลื่อนที่จากตำแหน่ง 180 องศามายังตำแหน่ง 0 องศาอีกครั้ง (Deceleration Phase) โดยจะสังเกตเห็นว่าตำแหน่งการเคลื่อนที่จะเป็นลักษณะสี่เหลี่ยมคางหมูต่อเนื่องกัน
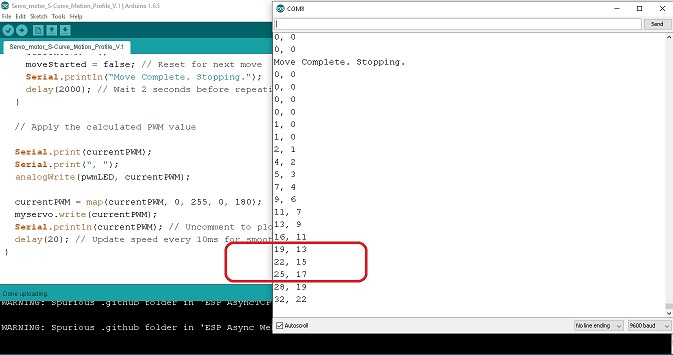
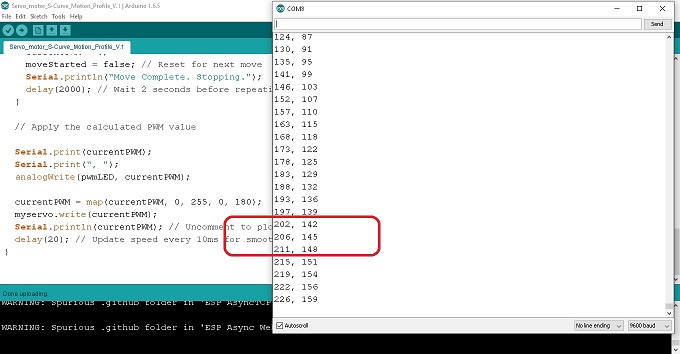
ในรูปที่่ 2 และรูปที่ 3 จะเป็นการทดลองให้เซอร์โวมอเตอร์เคลื่อนที่ไปที่่ตำแหน่ง 15 องศาและ 145 องศา ในกรอบสีแดงหน้าต่างสื่อสาร Serial Monitor โดยข้อมูลด้านซ้ายจะเป็นค่าเดิม 0-255 และข้อมูลด้านขวาจะเป็นข้อมูลคำสั่งให้เซอร์โวมอเตอร์เคลื่อนที่ 0-180 องศา
สำหรับการทดลองควบคุมเซอร์โวมอเตอร์ให้เคลื่อนที่แบบ S-Curve Motion Profile คงพอจะเป็นความรู้เบื้องต้น สำหรับการนำไปประยุกต์ใช้งานระหว่างการเคลื่อนที่แบบ S-Curve Motion Profile ร่วมกับเซอร์โวมอเตอร์และตัวอย่างการเขียนโปรแกรมคำสั่งให้กับบอร์ดควบคุม Arduino UNO เพื่อให้ผู้อ่านสามารถนำไปพัฒนาโครงงานต่างๆ ได้ง่ายและรวดเร็วยิ่งขึ้น
Reference
- https://electronics.stackexchange.com/questions/38573/smooth-a-motor-movement
- https://forum.arduino.cc/t/stepper-motor-s-curve/465667
- https://wokwi.com/projects/387721175033470977
- https://www.littlechip.co.nz/blog/a-simple-stepper-motor-control-algorithm
- https://www.solomotorcontrollers.com/blog/motion-planning-servo-drives
- https://fightpc.blogspot.com/2018/04/testing-sinusoidal-s-curves.html
- https://www.motioncontroltips.com/what-is-a-motion-profile/
- https://fightpc.blogspot.com/2018/04/how-to-get-sinusoidal-s-curve-for.html?m=1
- https://twasp.info/public/paper/33.%20683-695%20%20B%20Article%20final.pdf
- https://www.mouser.com/blog/understand-motion-trajectory-profiles-effective-motor-control
- https://forum.arduino.cc/t/some-math-questions-acceleration-curves/50918/4
- https://forum.arduino.cc/t/s-curve-for-easydriver-v3-stepper-motor-driver/22749
- https://www.mdpi.com/1424-8220/23/6/3074