Electrical and Electronics Learn Everyday
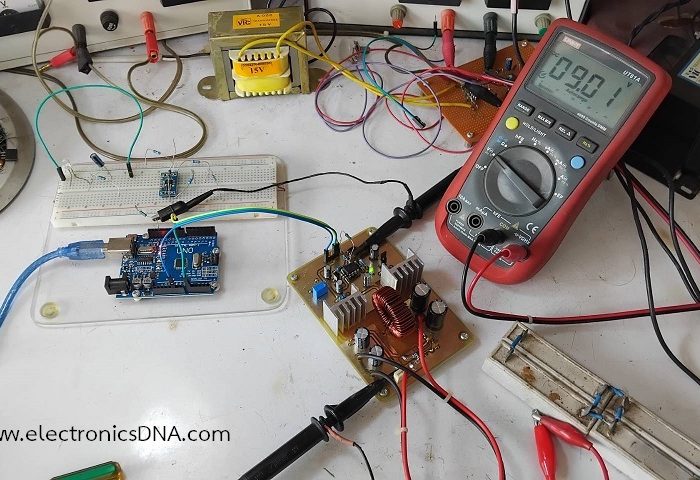
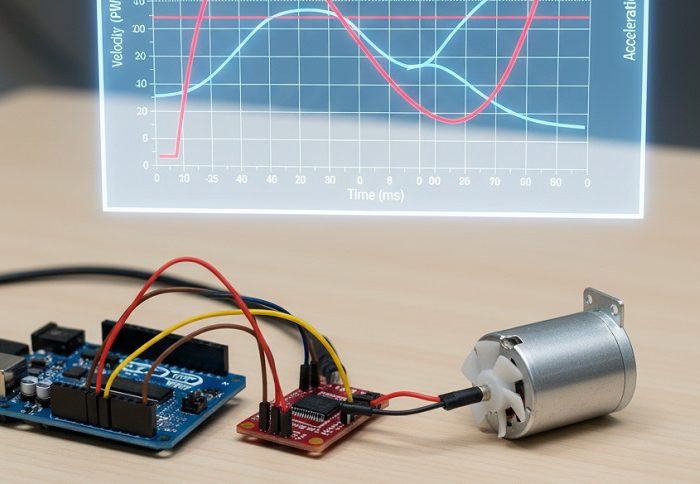
โครงงานเป็นการออกแบบวงจรซิงโครนัสบักคอนเวอร์เตอร์ขนาดเล็กโดยใช้ไอซี L293D สำหรับเป็นส่วนของวงจรขับกำลังและใช้บอร์ดควบคุม Arduino Mega1280
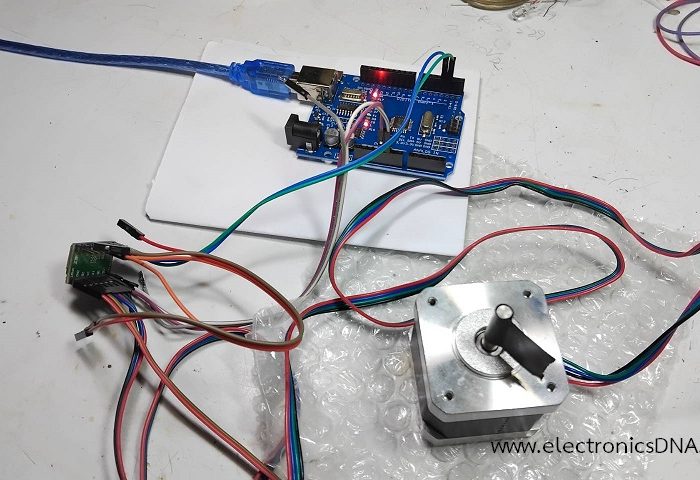
โครงงานนี้เป็นเนื้อหาต่อสำหรับการควบคุมการเคลื่อนที่แบบ S-Curve Motion Profile ด้วยบอร์ดควบคุม Arduino UNO ให้กับมอเตอร์แบบสเต็ปปิ้ง
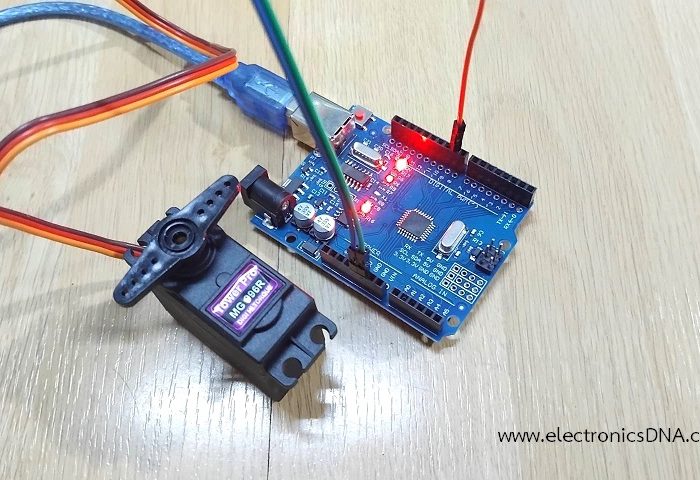
การทดลองนี้เป็นการควบคุมเซอร์โวมอเตอร์ให้คลื่อนที่แบบ S-Curve Motion Profile โดยใช้บอร์ดควบคุม Arduino UNO
ในตอนสุดท้ายสำหรับการเคลื่อนที่รูปตัว S (S-curve Motion Profile) เป็นตัวอย่างการเคลื่อนที่ของมอเตอร์แบบต่อเนื่องในทิศทางเดียวและสองทิศทาง

บทความนี้เป็นการเรียนรู้เกี่ยวกับการเคลื่อนที่รูปตัว S (S-curve Motion Profile) ซึ่งเป็นเทคนิคที่ใช้ในการควบคุมการเคลื่อนที่ของมอเตอร์ต่างๆ
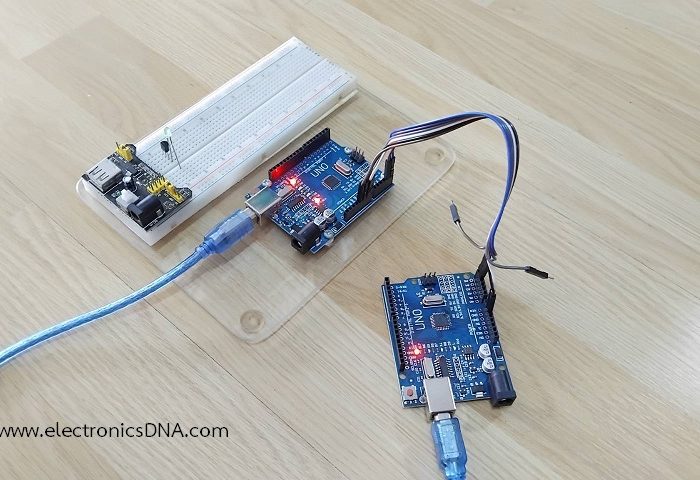
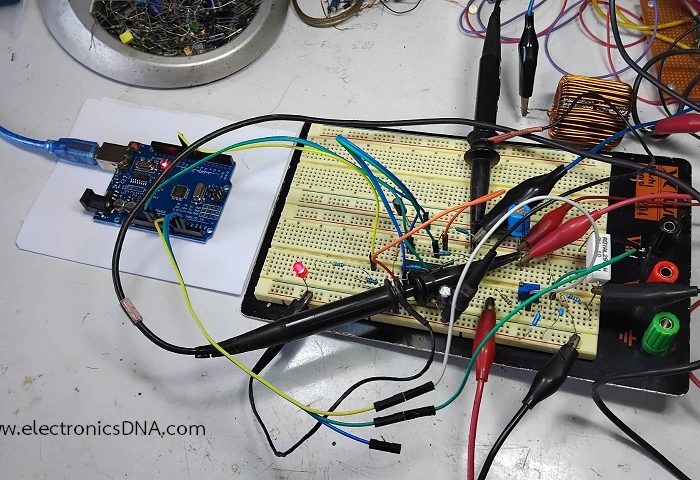
โครงงานนี้เป็นการทดลองสื่อสารกันระหว่างบอร์ด Arduino กับ Arduino ด้วยการสื่อสารแบบ I2C (Inter-Integrated Circuit) สำหรับเป็นการศึกษารูปแบบคำสั่งโปรแกรม Arduino IDE และการต่อวงจรระหว่างบอร์ดควบคุมเข้าด้วยกัน